-
1 выбор системы времени
Makarov: timingУниверсальный русско-английский словарь > выбор системы времени
-
2 выбор системы времени
Русско-английский физический словарь > выбор системы времени
-
3 выбор
м.choice, selection; sampling- выбор калибровки
- выбор места для обсерватории
- выбор момента времени
- выбор образца
- выбор системы времени
- выбор системы координат
- произвольный выбор -
4 блок полигонной системы единого времени
Авиация и космонавтика. Русско-английский словарь > блок полигонной системы единого времени
-
5 управление электропитанием
управление электропитанием
-
[Интент]
Управление электропитанием ЦОД
Автор: Жилкина Наталья
Опубликовано 23 апреля 2009 года
Источники бесперебойного питания, функционирующие в ЦОД, составляют важный элемент общей системы его энергообеспечения. Вписываясь в контур управления ЦОД, система мониторинга и управления ИБП становится ядром для реализации эксплуатационных функций.
Три задачи
Системы мониторинга, диагностики и управления питанием нагрузки решают три основные задачи: позволяют ИБП выполнять свои функции, оповещать персонал о происходящих с ними событиях и посылать команды для автоматического завершения работы защищаемого устройства.
Мониторинг параметров ИБП предполагает отображение и протоколирование состояния устройства и всех событий, связанных с его изменением. Диагностика реализуется функциями самотестирования системы. Управляющие же функции предполагают активное вмешательство в логику работы устройства.Многие специалисты этого рынка, отмечая важность процедуры мониторинга, считают, что управление должно быть сведено к минимуму. «Функция управления ИБП тоже нужна, но скорее факультативно, — говорит Сергей Ермаков, технический директор компании Inelt и эксперт в области систем Chloride. — Я глубоко убежден, что решения об активном управляющем вмешательстве в работу систем защиты электропитания ответственной нагрузки должен принимать человек, а не автоматизированная система. Завершение работы современных мощных серверов, на которых функционируют ответственные приложения, — это, как правило, весьма длительный процесс. ИБП зачастую не способны обеспечивать необходимое для него время, не говоря уж о времени запуска какого-то сервиса». Функция же мониторинга позволяет предотвратить наступление нежелательного события — либо, если таковое произошло, проанализировать его причины, опираясь не на слова, а на запротоколированные данные, хранящиеся в памяти адаптера или файлах на рабочей станции мониторинга.
Эту точку зрения поддерживает и Алексей Сарыгин, технический директор компании Radius Group: «Дистанционное управление мощных ИБП — это вопрос, к которому надо подходить чрезвычайно аккуратно. Если функции дистанционного мониторинга и диспетчеризации необходимы, то практика предоставления доступа персоналу к функциям дистанционного управления представляется радикально неверной. Доступность модулей управления извне потенциально несет в себе риск нарушения безопасности и категорически снижает надежность системы. Если существует физическая возможность дистанционно воздействовать на ИБП, на его параметры, отключение, снятие нагрузки, закрытие выходных тиристорных ключей или блокирование цепи байпаса, то это чревато потерей питания всего ЦОД».
Практически на всех трехфазных ИБП предусмотрена кнопка E.P.O. (Emergency Power Off), дублер которой может быть выведен на пульт управления диспетчерской. Она обеспечивает аварийное дистанционное отключение блоков ИБП при наступлении аварийных событий. Это, пожалуй, единственная возможность обесточить нагрузку, питаемую от трехфазного аппарата, но реализуется она в исключительных случаях.
Что же касается диагностики электропитания, то, как отмечает Юрий Копылов, технический директор московского офиса корпорации Eaton, в последнее время характерной тенденцией в управляющем программном обеспечении стал отказ от предоставления функций удаленного тестирования батарей даже системному администратору.
— Адекватно сравнивать состояние батарей необходимо под нагрузкой, — говорит он, — сам тест запускать не чаще чем раз в два дня, а разряжать батареи надо при одном и том же токе и уровне нагрузки. К тому же процесс заряда — довольно долгий. Все это не идет батареям на пользу.Средства мониторинга
Производители ИБП предоставляют, как правило, сразу несколько средств мониторинга и в некоторых случаях даже управления ИБП — все они основаны на трех основных методах.
В первом случае устройство подключается напрямую через интерфейс RS-232 (Com-порт) к консоли администратора. Дальность такого подключения не превышает 15 метров, но может быть увеличена с помощью конверторов RS-232/485 и RS-485/232 на концах провода, связывающего ИБП с консолью администратора. Такой способ обеспечивает низкую скорость обмена информацией и пригоден лишь для топологии «точка — точка».
Второй способ предполагает использование SNMP-адаптера — встроенной или внешней интерфейсной карты, позволяющей из любой точки локальной сети получить информацию об основных параметрах ИБП. В принципе, для доступа к ИБП через SNMP достаточно веб-браузера. Однако для большего комфорта производители оснащают свои системы более развитым графическим интерфейсом, обеспечивающим функции мониторинга и корректного завершения работы. На базе SNMP-протокола функционируют все основные системы мониторинга и управления ИБП, поставляемые штатно или опционально вместе с ИБП.
Стандартные SNMP-адаптеры поддерживают подключение нескольких аналоговых или пороговых устройств — датчик температуры, движения, открытия двери и проч. Интеграция таких устройств в общую систему мониторинга крупного объекта (например, дата-центра) позволяет охватить огромное количество точек наблюдения и отразить эту информацию на экране диспетчера.
Большое удобство предоставляет метод эксплуатационного удаленного контроля T.SERVICE, позволяющий отследить работу оборудования посредством телефонной линии (через модем GSM) или через Интернет (с помощью интерфейса Net Vision путем рассылки e-mail на электронный адрес потребителя). T.SERVICE обеспечивает диагностирование оборудования в режиме реального времени в течение 24 часов в сутки 365 дней в году. ИБП автоматически отправляет в центр технического обслуживания регулярные отчеты или отчеты при обнаружении неисправности. В зависимости от контролируемых параметров могут отправляться уведомления о неправильной эксплуатации (с пользователем связывается опытный специалист и рекомендует выполнить простые операции для предотвращения ухудшения рабочих характеристик оборудования) или о наличии отказа (пользователь информируется о состоянии устройства, а на место установки немедленно отправляется технический специалист).Профессиональное мнение
Наталья Маркина, коммерческий директор представительства компании SOCOMEC
Управляющее ПО фирмы SOCOMEC легко интегрируется в общий контур управления инженерной инфраструктурой ЦОД посредством разнообразных интерфейсов передачи данных ИБП. Установленное в аппаратной или ЦОД оборудование SOCOMEC может дистанционно обмениваться информацией о своих рабочих параметрах с системами централизованного управления и компьютерными сетями посредством сухих контактов, последовательных портов RS232, RS422, RS485, а также через интерфейс MODBUS TCP и GSS.
Интерфейс GSS предназначен для коммуникации с генераторными установками и включает в себя 4 входа (внешние контакты) и 1 выход (60 В). Это позволяет программировать особые процедуры управления, Global Supply System, которые обеспечивают полную совместимость ИБП с генераторными установками.
У компании Socomec имеется широкий выбор интерфейсов и коммуникационного программного обеспечения для установки диалога между ИБП и удаленными системами мониторинга промышленного и компьютерного оборудования. Такие опции связи, как панель дистанционного управления, интерфейс ADC (реконфигурируемые сухие контакты), обеспечивающий ввод и вывод данных при помощи сигналов сухих контактов, интерфейсы последовательной передачи данных RS232, RS422, RS485 по протоколам JBUS/MODBUS, PROFIBUS или DEVICENET, MODBUS TCP (JBUS/MODBUS-туннелирование), интерфейс NET VISION для локальной сети Ethernet, программное обеспечение TOP VISION для выполнения мониторинга с помощью рабочей станции Windows XP PRO — все это позволяет контролировать работу ИБП удобным для пользователя способом.
Весь контроль управления ИБП, ДГУ, контроль окружающей среды сводится в единый диспетчерский пункт посредством протоколов JBUS/MODBUS.
Индустриальный подход
Третий метод основан на использовании высокоскоростной индустриальной интерфейсной шины: CANBus, JBus, MODBus, PROFIBus и проч. Некоторые модели ИБП поддерживают разновидность универсального smart-слота для установки как карточек SNMP, так и интерфейсной шины. Система мониторинга на базе индустриальной шины может быть интегрирована в уже существующую промышленную SCADA-систему контроля и получения данных либо создана как заказное решение на базе многофункциональных стандартных контроллеров с выходом на шину. Промышленная шина через шлюзы передает информацию на удаленный диспетчерский пункт или в систему управления зданием (Building Management System, BMS). В эту систему могут быть интегрированы и контроллеры, управляющие ИБП.
Универсальные SCADA-системы поддерживают датчики и контроллеры широкого перечня производителей, но они недешевы и к тому же неудобны для внесения изменений. Но если подобная система уже функционирует на объекте, то интеграция в нее дополнительных ИБП не представляет труда.
Сергей Ермаков, технический директор компании Inelt, считает, что применение универсальных систем управления на базе промышленных контроллеров нецелесообразно, если используется для мониторинга только ИБП и ДГУ. Один из практичных подходов — создание заказной системы, с удобной для заказчика графической оболочкой и необходимым уровнем детализации — от карты местности до поэтажного плана и погружения в мнемосхему компонентов ИБП.
— ИБП может передавать одинаковое количество информации о своем состоянии и по прямому соединению, и по SNMP, и по Bus-шине, — говорит Сергей Ермаков. — Применение того или иного метода зависит от конкретной задачи и бюджета. Создав первоначально систему UPS Look для мониторинга ИБП, мы интегрировали в нее систему мониторинга ДГУ на основе SNMP-протокола, после чего по желанию одного из заказчиков конвертировали эту систему на промышленную шину Jbus. Новое ПО JSLook для мониторинга неограниченного количества ИБП и ДГУ по протоколу JBus является полнофункциональным средством мониторинга всей системы электроснабжения объекта.Профессиональное мение
Денис Андреев, руководитель департамента ИБП компании Landata
Практически все ИБП Eaton позволяют использовать коммуникационную Web-SNMP плату Connect UPS и датчик EMP (Environmental Monitoring Probe). Такой комплект позволяет в числе прочего осуществлять мониторинг температуры, влажности и состояния пары «сухих» контактов, к которым можно подключить внешние датчики.
Решение Eaton Environmental Rack Monitor представляет собой аналог такой связки, но с существенно более широким функционалом. Внешне эта система мониторинга температуры, влажности и состояния «сухих» контактов выполнена в виде компактного устройства, которое занимает минимум места в шкафу или в помещении.
Благодаря наличию у Eaton Environmental Rack Monitor (ERM) двух выходов датчики температуры или влажности можно разместить в разных точках стойки или помещения. Поскольку каждый из двух датчиков имеет еще по два сухих контакта, с них дополнительно можно принимать сигналы от датчиков задымления, утечки и проч. В центре обработки данных такая недорогая система ERM, состоящая из неограниченного количества датчиков, может транслировать информацию по протоколу SNMP в HTML-страницу и позволяет, не приобретая специального ПО, получить сводную таблицу измеряемых величин через веб-браузер.
Проблему дефицита пространства и высокой плотности размещения оборудования в серверных и ЦОД решают системы распределения питания линейки Eaton eDPU, которые можно установить как внутри стойки, так и на группу стоек.
Все модели этой линейки представляют четыре семейства: системы базового исполнения, системы с индикацией потребляемого тока, с мониторингом (локальным и удаленным, по сети) и управляемые, с возможностью мониторинга и управления электропитанием вплоть до каждой розетки. С помощью этих устройств можно компактным способом увеличить количество розеток в одной стойке, обеспечить контроль уровня тока и напряжения критичной нагрузки.
Контроль уровня потребляемой мощности может осуществляться с высокой степенью детализации, вплоть до сервера, подключенного к конкретной розетке. Это позволяет выяснить, какой сервер перегревается, где вышел из строя вентилятор, блок питания и т. д. Программным образом можно запустить сервер, подключенный к розетке ePDU. Интеграция системы контроля ePDU в платформу управления Eaton находится в процессе реализации.Требование объекта
Как поясняет Олег Письменский, в критичных объектах, таких как ЦОД, можно условно выделить две области контроля и управления. Первая, Grey Space, — это собственно здание и соответствующая система его энергообеспечения и энергораспределения. Вторая, White Space, — непосредственно машинный зал с его системами.
Выбор системы управления энергообеспечением ЦОД определяется типом объекта, требуемым функционалом системы управления и отведенным на эти цели бюджетом. В большинстве случаев кратковременная задержка между наступлением события и получением информации о нем системой мониторинга по SNMP-протоколу допустима. Тем не менее в целом ряде случаев, если характеристики объекта подразумевают непрерывность его функционирования, объект является комплексным и содержит большое количество элементов, требующих контроля и управления в реальном времени, ни одна стандартная система SNMP-мониторинга не обеспечит требуемого функционала. Для таких объектов применяют системы управления real-time, построенные на базе программно-аппаратных комплексов сбора данных, в том числе c функциями Softlogic.
Системы диспетчеризации и управления крупными объектами реализуются SCADA-системами, широкий перечень которых сегодня присутствует на рынке; представлены они и в портфеле решений Schneider Electric. Тип SCADA-системы зависит от класса и размера объекта, от количества его элементов, требующих контроля и управления, от уровня надежности. Частный вид реализации SCADA — это BMS-система(Building Management System).
«Дата-центры с объемом потребляемой мощности до 1,5 МВт и уровнем надежности Tier I, II и, с оговорками, даже Tier III, могут обслуживаться без дополнительной SCADA-системы, — говорит Олег Письменский. — На таких объектах целесообразно применять ISX Central — программно-аппаратный комплекс, использующий SNMP. Если же категория и мощность однозначно предполагают непрерывность управления, в таких случаях оправданна комбинация SNMP- и SCADA-системы. Например, для машинного зала (White Space) применяется ISX Central с возможными расширениями как Change & Capacity Manager, в комбинации со SCADA-системой, управляющей непосредственно объектом (Grey Space)».Профессиональное мнение
Олег Письменский, директор департамента консалтинга APC by Schneider Electric в России и СНГ
Подход APC by Schneider Electric к реализации полномасштабного полноуправляемого и надежного ЦОД изначально был основан на базисных принципах управления ИТ-инфраструктурой в рамках концепции ITIL/ITSM. И история развития системы управления инфраструктурой ЦОД ISX Manager, которая затем интегрировалась с программно-аппаратным комплексом NetBotz и трансформировалась в портал диспетчеризации ISX Central, — лучшее тому доказательство.
Первым итогом поэтапного приближения к намеченной цели стало наращивание функций контроля параметров энергообеспечения. Затем в этот контур подключилась система управления кондиционированием, система контроля параметров окружающей среды. Очередным шагом стало измерение скорости воздуха, влажности, пыли, радиации, интеграция сигналов от камер аудио- и видеонаблюдения, системы управления блоками розеток, завершения работы сервера и т. д.
Эта система не может и не должна отвечать абсолютно всем принципам ITSM, потому что не все они касаются существа поставленной задачи. Но как только в отношении политик и некоторых тактик управления емкостью и изменениями в ЦОД потребовался соответствующий инструментарий — это нашло отражение в расширении функционала ISX Central, который в настоящее время реализуют ПО APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager. С появлением этих двух решений, интегрированных в систему управления реальным объектом, АРС предоставляет возможность службе эксплуатации оптимально планировать изменения количественного и качественного состава оборудования машинного зала — как на ежедневном оперативном уровне, так и на уровне стратегических задач массовых будущих изменений.
Решение APC by Schneider Electric Capacity обеспечивает автоматизированную обработку информации о свободных ресурсах инженерной инфраструктуры, реальном потреблении мощности и пространстве в стойках. Обращаясь к серверу ISX Central, системы APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager оценивают степень загрузки ИБП и систем охлаждения InRow, прогнозируют воздействие предполагаемых изменений и предлагают оптимальное место для установки нового или перестановки имеющегося оборудования. Новые решения позволяют, выявив последствия от предполагаемых изменений, правильно спланировать замену оборудования в ЦОД.
Переход от частного к общему может потребовать интеграции ISX Central в такие, например, порталы управления, как Tivoli или Open View. Возможны и другие сценарии, когда ISX Central вписывается и в SCADA–систему. В этом случае ISX Central выполняет роль диспетчерской настройки, функционал которой распространяется на серверную комнату, но не охватывает целиком периметр объекта.Случай из практики
Решение задачи управления энергообеспечением ЦОД иногда вступает в противоречие с правилами устройств электроустановок (ПУЭ). Может оказаться, что в соответствии с ПУЭ в ряде случаев (например, при компоновке щитов ВРУ) необходимо обеспечить механические блокировки. Однако далеко не всегда это удается сделать. Поэтому такая задача часто требует нетривиального решения.
— В одном из проектов, — вспоминает Алексей Сарыгин, — где система управления включала большое количество точек со взаимными пересечениями блокировок, требовалось не допустить снижения общей надежности системы. В этом случае мы пришли к осознанному компромиссу, сделали систему полуавтоматической. Там, где это было возможно, присутствовали механические блокировки, за пультом дежурной смены были оставлены функции мониторинга и анализа, куда сводились все данные о положении всех автоматов. Но исполнительную часть вывели на отдельную панель управления уже внутри ВРУ, где были расположены подробные пользовательские инструкции по оперативному переключению. Таким образом мы избавились от излишней автоматизации, но постарались минимизировать потери в надежности и защититься от ошибок персонала.
[ http://www.computerra.ru/cio/old/products/infrastructure/421312/]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > управление электропитанием
-
6 SCADA
SCADA
SCADA-система
диспетчерское управление и сбор данных
ПО, предназначенное для поддержки средств автоматизации и построения систем промышленной автоматизации.
[ http://www.morepc.ru/dict/]SCADA (аббр. от англ. supervisory control and data acquisition, диспетчерское управление и сбор данных) — программный пакет, предназначенный для разработки или обеспечения работы в реальном времени систем сбора, обработки, отображения и архивирования информации об объекте мониторинга или управления. SCADA может являться частью АСУ ТП, АСКУЭ, системы экологического мониторинга, научного эксперимента, автоматизации здания и т. д. SCADA-системы используются во всех отраслях хозяйства, где требуется обеспечивать операторский контроль за технологическими процессами в реальном времени. Данное программное обеспечение устанавливается на компьютеры и, для связи с объектом, использует драйверы ввода-вывода или OPC/DDE серверы. Программный код может быть как написан на языке программирования (например на C++), так и сгенерирован в среде проектирования.
Иногда SCADA-системы комплектуются дополнительным ПО для программирования промышленных контроллеров. Такие SCADA-системы называются интегрированными и к ним добавляют термин SoftLogic.
Термин «SCADA» имеет двоякое толкование. Наиболее широко распространено понимание SCADA как приложения[2], то есть программного комплекса, обеспечивающего выполнение указанных функций, а также инструментальных средств для разработки этого программного обеспечения. Однако, часто под SCADA-системой подразумевают программно-аппаратный комплекс. Подобное понимание термина SCADA более характерно для раздела телеметрия.
Значение термина SCADA претерпело изменения вместе с развитием технологий автоматизации и управления технологическими процессами. В 80-е годы под SCADA-системами чаще понимали программно-аппаратные комплексы сбора данных реального времени. С 90-х годов термин SCADA больше используется для обозначения только программной части человеко-машинного интерфейса АСУ ТП.Основные задачи, решаемые SCADA-системами
SCADA-системы решают следующие задачи:- Обмен данными с «устройствами связи с объектом», то есть с промышленными контроллерами и платами ввода/вывода) в реальном времени через драйверы.
- Обработка информации в реальном времени.
- Логическое управление.
- Отображение информации на экране монитора в удобной и понятной для человека форме.
- Ведение базы данных реального времени с технологической информацией.
- Аварийная сигнализация и управление тревожными сообщениями.
- Подготовка и генерирование отчетов о ходе технологического процесса.
- Осуществление сетевого взаимодействия между SCADA ПК.
- Обеспечение связи с внешними приложениями (СУБД, электронные таблицы, текстовые процессоры и т. д.). В системе управления предприятием такими приложениями чаще всего являются приложения, относимые к уровню MES.
SCADA-системы позволяют разрабатывать АСУ ТП в клиент-серверной или в распределённой архитектуре.
Основные компоненты SCADA
SCADA—система обычно содержит следующие подсистемы:- Драйверы или серверы ввода-вывода — программы, обеспечивающие связь SCADA с промышленными контроллерами, счётчиками, АЦП и другими устройствами ввода-вывода информации.
- Система реального времени — программа, обеспечивающая обработку данных в пределах заданного временного цикла с учетом приоритетов.
- Человеко-машинный интерфейс (HMI, англ. Human Machine Interface) — инструмент, который представляет данные о ходе процесса человеку оператору, что позволяет оператору контролировать процесс и управлять им. Программа-редактор для разработки человеко-машинного интерфейса.
- Система логического управления — программа, обеспечивающая исполнение пользовательских программ (скриптов) логического управления в SCADA-системе. Набор редакторов для их разработки.
- База данных реального времени — программа, обеспечивающая сохранение истории процесса в режиме реального времени.
- Система управления тревогами — программа, обеспечивающая автоматический контроль технологических событий, отнесение их к категории нормальных, предупреждающих или аварийных, а также обработку событий оператором или компьютером.
- Генератор отчетов — программа, обеспечивающая создание пользовательских отчетов о технологических событиях. Набор редакторов для их разработки.
- Внешние интерфейсы — стандартные интерфейсы обмена данными между SCADA и другими приложениями. Обычно OPC, DDE, ODBC, DLL и т. д.
Концепции систем
Термин SCADA обычно относится к централизованным системам контроля и управления всей системой, или комплексами систем, осуществляемого с участием человека. Большинство управляющих воздействий выполняется автоматически RTU или ПЛК. Непосредственное управление процессом обычно обеспечивается RTU или PLC, а SCADA управляет режимами работы. Например, PLC может управлять потоком охлаждающей воды внутри части производственного процесса, а SCADA система может позволить операторам изменять уста для потока, менять маршруты движения жидкости, заполнять те или иные ёмкости, а также следить за тревожными сообщениями (алармами), такими как — потеря потока и высокая температура, которые должны быть отображены, записаны, и на которые оператор должен своевременно реагировать. Цикл управления с обратной связью проходит через RTU или ПЛК, в то время как SCADA система контролирует полное выполнение цикла.
Сбор данных начинается в RTU или на уровне PLC и включает — показания измерительного прибора. Далее данные собираются и форматируются таким способом, чтобы оператор диспетчерской, используя HMI мог принять контролирующие решения — корректировать или прервать стандартное управление средствами RTU/ПЛК. Данные могут также быть записаны в архив для построения трендов и другой аналитической обработки накопленных данных.[ http://ru.wikipedia.org/wiki/SCADA]
CitectSCADA
полнофункциональная система мониторинга, управления и сбора данных (SCADA – Supervisory Control And Data Acquisition)
ТЕХНИЧЕСКАЯ ИНФОРМАЦИЯ:CitectSCADA построена на базе мультизадачного ядра реального времени, что обеспечивает производительность сбора до 5 000 значений в секунду при работе в сетевом режиме с несколькими станциями. Модульная клиент-серверная архитектура позволяет одинаково эффективно применять CitectSCADA как в малых проектах, с использованием только одного АРМ, так и в больших, с распределением задач на несколько компьютеров.
В отличие от других SCADA-систем среда разработки CitectSCADA поставляется бесплатно. Оплачивается только среда исполнения (runtime). Это позволяет пользователю разработать и протестировать пробный проект, не вкладывая средств на начальном этапе.
Схема лицензирования CitectSCADA основана на учете числа одновременно задействованных компьютеров в проекте, а не общего числа компьютеров, на которых установлена CitectSCADA.
CitectSCADA лицензируется на заданное количество точек (дискретных или аналоговых переменных). При этом учитываются только внешние переменные, считываемые из устройств ввода/вывода, а внутренние переменные, находящиеся в памяти или на диске, бесплатны и не входят в количество лицензируемых точек. Градация количества лицензируемых точек в CitectSCADA более равномерна, чем в других системах: 75, 150, 500, 1 500, 5 000, 15 000, 50 000 и неограниченное количество.
В CitectSCADA резервирование является встроенным и легко конфигурируемым. Резервирование позволяет защищать все зоны потенциальных отказов как функциональных модулей (серверов и клиентов), так и сетевых соединений между узлами и устройствами ввода/вывода.
CitectSCADA имеет встроенный язык программирования CiCode, а также поддержку VBA.
CitectSCADA работает как 32-разрядное приложение Windows 9X/NT/2000/XP/2003. Сбор данных, формирование алармов и построение трендов происходит одновременно с редактированием и компиляцией.
[ http://www.rtsoft.ru/catalog/soft/scada/detail/343/]
Словесный портрет современной управляющей системы типа SCADA
-
Масштабируемая
- Наращивание системы без её переконфигурирования
- Масштабы проекта не ограничены
- До 255 одновременно подключённых клиентов
- Поддержка локальных и глобальных сетей
- Возможность интеграции с веб-приложениями без конфигурирования системы
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка кластерных конфигураций
- Возможность перезапуска отдельных процессов, относящихся к разным компонентам
-
Гибкая
- Полноценная архитектура «клиент-сервер»
- Возможность масштабирования серверов/серверных массивов алармов, трендов и отчётов
- Поддержка централизованного хранения файлов проекта для удобства обслуживания, а также распределённого хранения и комбинированного варианта
- Внесение изменений на отдельных локациях
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка устоявшихся и новых стандартов
-
Надёжная
- Встроенная поддержка режима ожидания
- Резервирование файловых серверов
- Резервирование сетевых коммуникаций
- Резервирование серверов алармов
- Резервирование серверов трендов
- Резервирование серверов отчётов
- Многоуровневое резервирование ввода-вывода
- Автоматическая замена серверов
- Автоматическая синхронизация историй трендов
- Автоматическая синхронизация таблиц алармов
- Автоматическая синхронизация времени
- Защитные функции
- Автоматический перезапуск в случае сбоя системы
- Высокопроизводительная
- Безопасная
-
Коммуникационные технологии
- Поддержка открытых коммуникационных стандартов
- Поддержка каждым сервером ввода-вывода многих протоколов
- Драйверы протоколов RS-232, RS-422, RS-485, TCP/IP
- Время установки драйверов в пределах 60 секунд
- До 255 одновременно подключённых клиентов
- До 4096 устройств ввода-вывода на одну систему
- Поддержка внешнего подключения для удалённых устройств
- Средства разработки драйверов для специализированных протоколов
- Поддержка стандарта OPC Server DA2.0
- Интегрированный веб-сервис XML
- Доступ
- Неограниченное число меток
- Длина имени метки до 80 символов
- Поддержка меток качества и времени для соответствующих драйверов
- Единая база данных для контроллеров ПЛК и системы SCADA
- Двунаправленная синхронизация со средой разработки для ПЛК
- Статическая синхронизация для разработки в автономном режиме
- - Автоматические импорт и синхронизация
- Импорт из ПЛК разных типов
- Добавление пользовательских схем импорта
-
Разработка
- Неограниченное число экранов
- 24-битные цвета
- Быстрый выбор цветов по названиям
- Поддержка прозрачных цветов
- Продвинутая анимация без дополнительного программирования
- Анимация символов на базе тегов
- До 32000 анимированных изображений на страницу
- Неограниченное число мигающих цветов
- Мультиязычность
- Инструменты типа 3D Pipe
- Трёхмерные эффекты (поднятие, опускание, выдавливание)
-
Импорт графики
- Растровые изображения Windows (BMP, RLE, DIB)
- Формат AutoCAD (DXF)
- Формат Encapsulated Postscript (EPS)
- Формат Fax Image (FAX)
- Формат Ventura (IMG)
- Формат JPEG (JPG, JIF, JFF, JFE)
- Формат Photo CD (PCD)
- Формат PaintBrush (PCX)
- Формат Portable Network Graphics (PNG)
- Формат Targa (TGA)
- Формат Tagged Image Format (TIFF)
- Формат Windows Meta File (WMF)
- Формат Word Perfect Graphics (WPG)
- Неограниченное число отмен действий
- Кнопки в стиле Windows XP со свойствами динамического перемещения
- Шаблоны
- Символы
- Более 800 символов в комплекте поставки
-
Объектное конфигурирование
- Неограниченное число объектов типа «джинн» (Genie) и «суперджинн» (Super Genie)
- Пользовательские «джинны» позволяют отображать на экране пользовательское оборудование
- Пользовательские «суперджины» позволяют работать с разными устройствами через один интерфейс
- Объекты типа «джинн» и «суперджинн» способны воспринимать изменения в тегах устройств без дополнительного программирования
-
Работа
- Разрешения до 4096 x 4096
- Изменение размеров изображений (изотропное и анизотропное)
- Поддержка вывода на несколько мониторов
- Настройка скорости обновления страниц (минимум 10 мс)
- Информирование о потере связи
- Переключение языков в ходе работы
- Поддержка одно- и двухбайтовых наборов символов
-
Безопасность
- Уровень безопасности влияет на:
- Видимость объектов
- Доступ к графическим дисплеям
- Подтверждение алармов
- Создание отчётов
- Системные утилиты
-
Управление
- Сенсорные команды
- Мышь
- -Клавиатурное управление системой, страницами и анимацией
- Вертикальные и горизонтальные ползунки
- Замена БД
-
Анализ процессов
- Объединение алармов с трендами
- 32 и более перьев
- 4 и более оконных секций
- 2 и более курсоров
- Наложение перьев
- Информация о качестве данных
- Аналоговые и цифровые перья
- Информация о подтверждении алармов
- Описание алармов (аналоговых и мультицифровых)
- Комментарии к алармам
- Поддержка перехода на летнее и зимнее время
- Сохранение просмотров в процессе работы
- Хранение просмотров в удалённых локациях
- Отображение различных временных периодов на том же дисплее
- Настраиваемое и расширяемое управление
-
Алармы
- Неограниченное число алармов
- Централизованная обработка алармов
- Алармы могут быть следующих типов:
- Цифровые
- Аналоговые
- Временные метки
- Высокоуровневые выражения
- Мультицифровые
- Цифровые с временными метками
- Аналоговые с временными метками
- Изменение языка для всех алармов в процессе работы
- Подтверждение приёма в сети без дополнительного конфигурирования
- Отключение сети без дополнительного конфигурирования
- Категории, зоны и приоритеты алармов
- Задержки алармов
- Назначение временных меток с разрешением в 1 мс
- Различные данные в алармах
- Индивидуальные и групповые подтверждения
- Подтверждения на основе категорий и приоритетов
- Подтверждения отображаются графически, в списке алармов или через специализированный код:
- Сортировка алармов
- Фильтрация алармов
- Пользовательские поля алармов
-
Тренды
- Неограниченное число трендов
- До 16000 трендов на страницу
- Отображение любого тренда из истории менее чем за 1 секунду
- Файлов трендов регулируемых размеров
- Просмотр архивных трендов параллельно с актуальными в процессе работы системы
- Выбор с разрешением 1 мс
- Сравнение трендов
- Быстрый выбор трендов по тегам
- Сохранение по событию или периодическое сохранение
Статистический контроль ( SPC)
- Таблицы индексов Cp и CpK
- Контрольные карты X, R и S
- Диаграммы Парето
- Настраиваемые размеры и границы подгрупп
- Типы алармов: Above UCL, Below LCL, Outside CL, Down Trend, Up Trend, Erratic, Gradual, Down, Gradual Up, Mixture, Outside WL, Freak, Stratification и высокоуровневые выражения
- Редактор сгенерированных отчётов, редактирование по модели WYSIWYN, отчёты в формате Rich Text
- Запуск внешними событиями, по расписанию, через высокоуровневые выражения и по команде оператора
- Вывод на принтер, в файл, по электронной почте, на экран, в формат HTML
- Разработка проекта
- Масштабы проекта не ограничены
- Возможность разбиения на несколько проектов
- Удобная стандартизация проектов
- Удобное обслуживание проектов
- Встроенное средство настройки компьютеров позволяет конфигурировать каждый подключённый к сети ПК по отдельности
- Истинная вытесняющая многозадачность
- До 512 параллельных потоков
- Доступно более 600 функций SCADA
- Библиотеки для пользовательских функций
- До 2700 пользовательских функций
- Локальные, модульные и глобальные переменные
- Дополнительное программное обеспечение для создания собственных функций не требуется
- Прямой доступ к данным трендов, отчётов и алармов
- Подсвечивание синтаксиса
- Система онлайн-подсказок
- Всплывающие подсказки
- При редактировании доступны:
- Контрольные точки
- Просмотр переменных
- Мониторинг нитей
- Выделение кода цветом
- Окно контрольных точек
- Пошаговый режим выполнения
- Выделение текущей строки
- Удалённая отладка
- Автоматическая отладка в случае ошибок
- Сервер и клиент OPC
- Интерфейс ODBC
- Интерфейс OLE-DB
- Интерфейс CTAPI
- Интерфейс DLL
- Интерфейс MAPI (MAIL)
- Протоколы TCP/IP
- Последовательный интерфейс
[ http://www.rtsoft-training.ru/?p=600074]
Тематики
Синонимы
- SCADA-система
- диспетчерское управление и сбор данных
- система диспетчерского управления и сбора данных
- система мониторинга, управления и сбора данных
EN
Русско-английский словарь нормативно-технической терминологии > SCADA
-
7 автоматическое повторное включение
- Wiedereinschaltung, automatische
- selbsttätiges Wiederschließen (eines mechanischen Schaltgerätes)
- Kurzunterbrechung
- automatische Wiedereinschaltung
автоматическое повторное включение
АПВ
Коммутационный цикл, при котором выключатель вслед за его отключением автоматически включается через установленный промежуток времени (О - tбт - В).
[ ГОСТ Р 52565-2006]
автоматическое повторное включение
АПВ
Автоматическое включение аварийно отключившегося элемента электрической сети
[ОАО РАО "ЕЭС России" СТО 17330282.27.010.001-2008]
(автоматическое) повторное включение
АПВ
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва]EN
automatic reclosing
automatic reclosing of a circuit-breaker associated with a faulted section of a network after an interval of time which permits that section to recover from a transient fault
[IEC 61936-1, ed. 1.0 (2002-10)]
[IEV 604-02-32]
auto-reclosing
the operating sequence of a mechanical switching device whereby, following its opening, it closes automatically after a predetermined time
[IEC 62271-100, ed. 2.0 (2008-04)]
auto-reclosing (of a mechanical switching device)
the operating sequence of a mechanical switching device whereby, following its opening, it closes automatically after a predetermined time
[IEV number 441-16-10]FR
réenclenchement automatique
refermeture du disjoncteur associé à une fraction de réseau affectée d'un défaut, par un dispositif automatique après un intervalle de temps permettant la disparition d'un défaut fugitif
[IEC 61936-1, ed. 1.0 (2002-10)]
[IEV 604-02-32]
refermeture automatique
séquence de manoeuvres par laquelle, à la suite d’une ouverture, un appareil mécanique de connexion est refermé automatiquement après un intervalle de temps prédéterminé
[IEC 62271-100, ed. 2.0 (2008-04)]
refermeture automatique (d'un appareil mécanique de connexion)
séquence de manoeuvres par laquelle, à la suite d'une ouverture, un appareil mécanique de connexion est refermé automatiquement après un intervalle de temps prédéterminé
[IEV number 441-16-10]
Автоматическое повторное включение (АПВ), быстрое автоматическое обратное включение в работу высоковольтных линий электропередачи и электрооборудования высокого напряжения после их автоматического отключения; одно из наиболее эффективных средств противоаварийной автоматики. Повышает надёжность электроснабжения потребителей и восстанавливает нормальный режим работы электрической системы. Во многих случаях после быстрого отключения участка электрической системы, на котором возникло короткое замыкание в результате кратковременного нарушения изоляции или пробоя воздушного промежутка, при последующей подаче напряжения повторное короткое замыкание не возникает. АПВ выполняется с помощью автоматических устройств, воздействующих на высоковольтные выключатели после их аварийного автоматического отключения от релейной защиты. Многие из этих автоматических устройств обеспечивают АПВ при самопроизвольном отключении выключателей, например при сильных сотрясениях почвы во время близких взрывов, землетрясениях и т. п. Эффективность АПВ тем выше, чем быстрее следует оно за аварийным отключением, т. е. чем меньше время перерыва питания потребителей. Это время зависит от длительности цикла АПВ. В электрических системах применяют однократное АПВ — с одним циклом, двукратное — при неуспешном первом цикле, и трёхкратное — с тремя последовательными циклами. Цикл АПВ — время от момента подачи сигнала на отключение до замыкания цепи главными контактами выключателя — состоит из времени отключения и включения выключателя и времени срабатывания устройства АПВ. Длительность бестоковой паузы, когда потребитель не получает электроэнергию, выбирается такой, чтобы успело произойти восстановление изоляции (деионизация среды) в месте короткого замыкания, привод выключателя после отключения был бы готов к повторному включению, а выключатель к моменту замыкания его главных контактов восстановил способность к отключению поврежденной цепи в случае неуспешного АПВ. Время деионизации зависит от среды, климатических условий и других факторов. Время восстановления отключающей способности выключателя определяется его конструкцией и количеством циклов АПВ., предшествовавших данному. Обычно длительность 1-го цикла не превышает 0,5—1,5 сек, 2-го — от 10 до 15 сек, 3-го — от 60 до 120 сек.
Наиболее распространено однократное АПВ, обеспечивающее на воздушных линиях высокого напряжения (110 кв и выше) до 86 %, а на кабельных линиях (3—10 кв) — до 55 % успешных включений. Двукратное АПВ обеспечивает во втором цикле до 15 % успешных включений. Третий цикл увеличивает число успешных включений всего на 3—5 %. На линиях электропередачи высокого напряжения (от 110 до 500 кВ) применяется однофазовое АПВ; при этом выключатели должны иметь отдельные приводы на каждой фазе.
Применение АПВ экономически выгодно, т. к. стоимость устройств АПВ и их эксплуатации несравнимо меньше ущерба из-за перерыва в подаче электроэнергии.
[ БСЭ]
НАЗНАЧЕНИЕ И ОБЛАСТЬ ПРИМЕНЕНИЯ АПВ
Опыт эксплуатации сетей высокого напряжения показал, что если поврежденную линию электропередачи быстро отключить, т. е. снять с нее напряжение, то в большинстве случаев повреждение ликвидируется. При этом электрическая дуга, возникавшая в месте короткого замыкания (КЗ), не успевает вызвать существенных разрушений оборудования, препятствующих обратному включению линии под напряжение.
Самоустраняющиеся повреждения принято называть неустойчивыми. Такие повреждения возникают в результате грозовых перекрытий изоляции, схлестывания проводов при ветре и сбрасывании гололеда, падения деревьев, задевания проводов движущимися механизмами.
Данные о повреждаемости воздушных линий электропередачи (ВЛ) за многолетний период эксплуатации показывают, что доля неустойчивых повреждений весьма высока и составляет 50—90 %.
При ликвидации аварии оперативный персонал производит обычно опробование линии путем включения ее под напряжение, так как отыскание места повреждения на линии электропередачи путем ее обхода требует длительного времени, а многие повреждения носят неустойчивый характер. Эту операцию называют повторным включением.
Если КЗ самоустранилось, то линия, на которой произошло неустойчивое повреждение, при повторном включении остается в работе. Поэтому повторные включения при неустойчивых повреждениях принято называть успешными.
На ВЛ успешность повторного включения сильно зависит от номинального напряжения линий. На линиях ПО кВ и выше успешность повторного включения значительно выше, чем на ВЛ 6—35 кВ. Высокий процент успешных повторных включений в сетях высокого и сверхвысокого напряжения объясняется быстродействием релейной защиты (как правило, не более 0,1-0,15 с), большим сечением проводов и расстояний между ними, высокой механической прочностью опор. [Овчинников В. В., Автоматическое повторное включение. — М.:Энергоатомиздат, 1986.— 96 с: ил. — (Б-ка электромонтера; Вып. 587). Энергоатомиздат, 1986]
АВТОМАТИЧЕСКОЕ ПОВТОРНОЕ ВКЛЮЧЕНИЕ (АПВ)
3.3.2. Устройства АПВ должны предусматриваться для быстрого восстановления питания потребителей или межсистемных и внутрисистемных связей путем автоматического включения выключателей, отключенных устройствами релейной защиты.
Должно предусматриваться автоматическое повторное включение:
1) воздушных и смешанных (кабельно-воздушных) линий всех типов напряжением выше 1 кВ. Отказ от применения АПВ должен быть в каждом отдельном случае обоснован. На кабельных линиях 35 кВ и ниже АПВ рекомендуется применять в случаях, когда оно может быть эффективным в связи со значительной вероятностью повреждений с образованием открытой дуги (например, наличие нескольких промежуточных сборок, питание по одной линии нескольких подстанций), а также с целью исправления неселективного действия защиты. Вопрос о применении АПВ на кабельных линиях 110 кВ и выше должен решаться при проектировании в каждом отдельном случае с учетом конкретных условий;
2) шин электростанций и подстанций (см. 3.3.24 и 3.3.25);
3) трансформаторов (см. 3.3.26);
4) ответственных электродвигателей, отключаемых для обеспечения самозапуска других электродвигателей (см. 3.3.38).
Для осуществления АПВ по п. 1-3 должны также предусматриваться устройства АПВ на обходных, шиносоединительных и секционных выключателях.
Допускается в целях экономии аппаратуры выполнение устройства группового АПВ на линиях, в первую очередь кабельных, и других присоединениях 6-10 кВ. При этом следует учитывать недостатки устройства группового АПВ, например возможность отказа в случае, если после отключения выключателя одного из присоединений отключение выключателя другого присоединения происходит до возврата устройства АПВ в исходное положение.
3.3.3. Устройства АПВ должны быть выполнены так, чтобы они не действовали при:
1) отключении выключателя персоналом дистанционно или при помощи телеуправления;
2) автоматическом отключении от релейной защиты непосредственно после включения персоналом дистанционно или при помощи телеуправления;
3) отключении выключателя защитой от внутренних повреждений трансформаторов и вращающихся машин, устройствами противоаварийной автоматики, а также в других случаях отключений выключателя, когда действие АПВ недопустимо. АПВ после действия АЧР (ЧАПВ) должно выполняться в соответствии с 3.3.81.
Устройства АПВ должны быть выполнены так, чтобы была исключена возможностью многократного включения на КЗ при любой неисправности в схеме устройства.
Устройства АПВ должны выполняться с автоматическим возвратом.
3.3.4. При применении АПВ должно, как правило, предусматриваться ускорение действия релейной защиты на случай неуспешного АПВ. Ускорение действия релейной защиты после неуспешного АПВ выполняется с помощью устройства ускорения после включения выключателя, которое, как правило, должно использоваться и при включении выключателя по другим причинам (от ключа управления, телеуправления или устройства АВР). При ускорении защиты после включения выключателя должны быть приняты меры против возможного отключения выключателя защитой под действием толчка тока при включении из-за неодновременного включения фаз выключателя.
Не следует ускорять защиты после включения выключателя, когда линия уже включена под напряжение другим своим выключателем (т. е. при наличии симметричного напряжения на линии).
Допускается не ускорять после АПВ действие защит линий 35 кВ и ниже, выполненных на переменном оперативном токе, если для этого требуется значительное усложнение защит и время их действия при металлическом КЗ вблизи места установки не превосходит 1,5 с.
3.3.5. Устройства трехфазного АПВ (ТАПВ) должны осуществляться преимущественно с пуском при несоответствии между ранее поданной оперативной командой и отключенным положением выключателя; допускается также пуск устройства АПВ от защиты.
3.3.6. Могут применяться, как правило, устройства ТАПВ однократного или двукратного действия (последнее - если это допустимо по условиям работы выключателя). Устройство ТАПВ двукратного действия рекомендуется принимать для воздушных линий, в особенности для одиночных с односторонним питанием. В сетях 35 кВ и ниже устройства ТАПВ двукратного действия рекомендуется применять в первую очередь для линий, не имеющих резервирования по сети.
В сетях с изолированной или компенсированной нейтралью, как правило, должна применяться блокировка второго цикла АПВ в случае замыкания на землю после АПВ первого цикла (например, по наличию напряжений нулевой последовательности). Выдержка времени ТАПВ во втором цикле должна быть не менее 15-20 с.
3.3.7. Для ускорения восстановления нормального режима работы электропередачи выдержка времени устройства ТАПВ (в особенности для первого цикла АПВ двукратного действия на линиях с односторонним питанием) должна приниматься минимально возможной с учетом времени погасания дуги и деионизации среды в месте повреждения, а также с учетом времени готовности выключателя и его привода к повторному включению.
Выдержка времени устройства ТАПВ на линии с двусторонним питанием должна выбираться также с учетом возможного неодновременного отключения повреждения с обоих концов линии; при этом время действия защит, предназначенных для дальнего резервирования, учитываться не должно. Допускается не учитывать разновременности отключения выключателей по концам линии, когда они отключаются в результате срабатывания высокочастотной защиты.
С целью повышения эффективности ТАПВ однократного действия допускается увеличивать его выдержку времени (по возможности с учетом работы потребителя).
3.3.8. На одиночных линиях 110 кВ и выше с односторонним питанием, для которых допустим в случае неуспешного ТАПВ переход на длительную работу двумя фазами, следует предусматривать ТАПВ двукратного действия на питающем конце линии. Перевод линии на работу двумя фазами может производиться персоналом на месте или при помощи телеуправления.
Для перевода линии после неуспешного АПВ на работу двумя фазами следует предусматривать пофазное управление разъединителями или выключателями на питающем и приемном концах линии.
При переводе линии на длительную работу двумя фазами следует при необходимости принимать меры к уменьшению помех в работе линий связи из-за неполнофазного режима работы линии. С этой целью допускается ограничение мощности, передаваемой по линии в неполнофазном режиме (если это возможно по условиям работы потребителя).
В отдельных случаях при наличии специального обоснования допускается также перерыв в работе линии связи на время неполнофазного режима.
3.3.9. На линиях, отключение которых не приводит к нарушению электрической связи между генерирующими источниками, например на параллельных линиях с односторонним питанием, следует устанавливать устройства ТАПВ без проверки синхронизма.
3.3.10. На одиночных линиях с двусторонним питанием (при отсутствии шунтирующих связей) должен предусматриваться один из следующих видов трехфазного АПВ (или их комбинаций):
а) быстродействующее ТАПВ (БАПВ)
б) несинхронное ТАПВ (НАПВ);
в) ТАПВ с улавливанием синхронизма (ТАПВ УС).
Кроме того, может предусматриваться однофазное АПВ (ОАПВ) в сочетании с различными видами ТАПВ, если выключатели оборудованы пофазным управлением и не нарушается устойчивость параллельной работы частей энергосистемы в цикле ОАПВ.
Выбор видов АПВ производится, исходя из совокупности конкретных условий работы системы и оборудования с учетом указаний 3.3.11-3.3.15.
3.3.11. Быстродействующее АПВ, или БАПВ (одновременное включение с минимальной выдержкой времени с обоих концов), рекомендуется предусматривать на линиях по 3.3.10 для автоматического повторного включения, как правило, при небольшом расхождении угла между векторами ЭДС соединяемых систем. БАПВ может применяться при наличии выключателей, допускающих БАПВ, если после включения обеспечивается сохранение синхронной параллельной работы систем и максимальный электромагнитный момент синхронных генераторов и компенсаторов меньше (с учетом необходимого запаса) электромагнитного момента, возникающего при трехфазном КЗ на выводах машины.
Оценка максимального электромагнитного момента должна производиться для предельно возможного расхождения угла за время БАПВ. Соответственно запуск БАПВ должен производиться лишь при срабатывании быстродействующей защиты, зона действия которой охватывает всю линию. БАПВ должно блокироваться при срабатывании резервных защит и блокироваться или задерживаться при работе УРОВ.
Если для сохранения устойчивости энергосистемы при неуспешном БАПВ требуется большой объем воздействий от противоаварийной автоматики, применение БАПВ не рекомендуется.
3.3.12. Несинхронное АПВ (НАПВ) может применяться на линиях по 3.3.10 (в основном 110-220 кВ), если:
а) максимальный электромагнитный момент синхронных генераторов и компенсаторов, возникающий при несинхронном включении, меньше (с учетом необходимого запаса) электромагнитного момента, возникающего при трехфазном КЗ на выводах машины, при этом в качестве практических критериев оценки допустимости НАПВ принимаются расчетные начальные значения периодических составляющих токов статора при угле включения 180°;
б) максимальный ток через трансформатор (автотрансформатор) при угле включения 180° меньше тока КЗ на его выводах при питании от шин бесконечной мощности;
в) после АПВ обеспечивается достаточно быстрая ресинхронизация; если в результате несинхронного автоматического повторного включения возможно возникновение длительного асинхронного хода, должны применяться специальные мероприятия для его предотвращения или прекращения.
При соблюдении этих условий НАПВ допускается применять также в режиме ремонта на параллельных линиях.
При выполнении НАПВ необходимо принять меры по предотвращению излишнего срабатывания защиты. С этой целью рекомендуется, в частности, осуществлять включение выключателей при НАПВ в определенной последовательности, например выполнением АПВ с одной из сторон линии с контролем наличия напряжения на ней после успешного ТАПВ с противоположной стороны.
3.3.13. АПВ с улавливанием синхронизма может применяться на линиях по 3.3.10 для включения линии при значительных (примерно до 4%) скольжениях и допустимом угле.
Возможно также следующее выполнение АПВ. На конце линии, который должен включаться первым, производится ускоренное ТАПВ (с фиксацией срабатывания быстродействующей защиты, зона действия которой охватывает всю линию) без контроля напряжения на линии (УТАПВ БК) или ТАПВ с контролем отсутствия напряжения на линии (ТАПВ ОН), а на другом ее конце - ТАПВ с улавливанием синхронизма. Последнее производится при условии, что включение первого конца было успешным (это может быть определено, например, при помощи контроля наличия напряжения на линии).
Для улавливания синхронизма могут применяться устройства, построенные по принципу синхронизатора с постоянным углом опережения.
Устройства АПВ следует выполнять так, чтобы имелась возможность изменять очередность включения выключателей по концам линии.
При выполнении устройства АПВ УС необходимо стремиться к обеспечению его действия при возможно большей разности частот. Максимальный допустимый угол включения при применении АПВ УС должен приниматься с учетом условий, указанных в 3.3.12. При применении устройства АПВ УС рекомендуется его использование для включения линии персоналом (полуавтоматическая синхронизация).
3.3.14. На линиях, оборудованных трансформаторами напряжения, для контроля отсутствия напряжения (КОН) и контроля наличия напряжения (КНН) на линии при различных видах ТАПВ рекомендуется использовать органы, реагирующие на линейное (фазное) напряжение и на напряжения обратной и нулевой последовательностей. В некоторых случаях, например на линиях без шунтирующих реакторов, можно не использовать напряжение нулевой последовательности.
3.3.15. Однофазное автоматическое повторное включение (ОАПВ) может применяться только в сетях с большим током замыкания на землю. ОАПВ без автоматического перевода линии на длительный неполнофазный режим при устойчивом повреждении фазы следует применять:
а) на одиночных сильно нагруженных межсистемных или внутрисистемных линиях электропередачи;
б) на сильно нагруженных межсистемных линиях 220 кВ и выше с двумя и более обходными связями при условии, что отключение одной из них может привести к нарушению динамической устойчивости энергосистемы;
в) на межсистемных и внутрисистемных линиях разных классов напряжения, если трехфазное отключение линии высшего напряжения может привести к недопустимой перегрузке линий низшего напряжения с возможностью нарушения устойчивости энергосистемы;
г) на линиях, связывающих с системой крупные блочные электростанции без значительной местной нагрузки;
д) на линиях электропередачи, где осуществление ТАПВ сопряжено со значительным сбросом нагрузки вследствие понижения напряжения.
Устройство ОАПВ должно выполняться так, чтобы при выводе его из работы или исчезновении питания автоматически осуществлялся перевод действия защит линии на отключение трех фаз помимо устройства.
Выбор поврежденных фаз при КЗ на землю должен осуществляться при помощи избирательных органов, которые могут быть также использованы в качестве дополнительной быстродействующей защиты линии в цикле ОАПВ, при ТАПВ, БАПВ и одностороннем включении линии оперативным персоналом.
Выдержка временем ОАПВ должна отстраиваться от времени погасания дуги и деионизации среды в месте однофазного КЗ в неполнофазном режиме с учетом возможности неодновременного срабатывания защиты по концам линии, а также каскадного действия избирательных органов.
3.3.16. На линиях по 3.3.15 ОАПВ должно применяться в сочетании с различными видами ТАПВ. При этом должна быть предусмотрена возможность запрета ТАПВ во всех случаях ОАПВ или только при неуспешном ОАПВ. В зависимости от конкретных условий допускается осуществление ТАПВ после неуспешного ОАПВ. В этих случаях предусматривается действие ТАПВ сначала на одном конце линии с контролем отсутствия напряжения на линии и с увеличенной выдержкой времени.
3.3.17. На одиночных линиях с двусторонним питанием, связывающих систему с электростанцией небольшой мощности, могут применяться ТАПВ с автоматической самосинхронизацией (АПВС) гидрогенераторов для гидроэлектростанций и ТАПВ в сочетании с делительными устройствами - для гидро- и теплоэлектростанций.
3.3.18. На линиях с двусторонним питанием при наличии нескольких обходных связей следует применять:
1) при наличии двух связей, а также при наличии трех связей, если вероятно одновременное длительное отключение двух из этих связей (например, двухцепной линии):
несинхронное АПВ (в основном для линий 110-220 кВ и при соблюдении условий, указанных в 3.3.12, но для случая отключения всех связей);
АПВ с проверкой синхронизма (при невозможности выполнения несинхронного АПВ по причинам, указанным в 3.3.12, но для случая отключения всех связей).
Для ответственных линий при наличии двух связей, а также при наличии трех связей, две из которых - двухцепная линия, при невозможности применения НАПВ по причинам, указанным в 3.3.12, разрешается применять устройства ОАПВ, БАПВ или АПВ УС (см. 3.3.11, 3.3.13, 3.3.15). При этом устройства ОАПВ и БАПВ следует дополнять устройством АПВ с проверкой синхронизма;
2) при наличии четырех и более связей, а также при наличии трех связей, если в последнем случае одновременное длительное отключение двух из этих связей маловероятно (например, если все линии одноцепные), - АПВ без проверки синхронизма.
3.3.19. Устройства АПВ с проверкой синхронизма следует выполнять на одном конце линии с контролем отсутствия напряжения на линии и с контролем наличия синхронизма, на другом конце - только с контролем наличия синхронизма. Схемы устройства АПВ с проверкой синхронизма линии должны выполняться одинаковыми на обоих концах с учетом возможности изменения очередности включения выключателей линии при АПВ.
Рекомендуется использовать устройство АПВ с проверкой синхронизма для проверки синхронизма соединяемых систем при включении линии персоналом.
3.3.20. Допускается совместное применение нескольких видов трехфазного АПВ на линии, например БАПВ и ТАПВ с проверкой синхронизма. Допускается также использовать различные виды устройств АПВ на разных концах линии, например УТАПВ БК (см. 3.3.13) на одном конце линии и ТАПВ с контролем наличия напряжения и синхронизма на другом.
3.3.21. Допускается сочетание ТАПВ с неселективными быстродействующими защитами для исправления неселективного действия последних. В сетях, состоящих из ряда последовательно включенных линий, при применении для них неселективных быстродействующих защит для исправления их действия рекомендуется применять поочередное АПВ; могут также применяться устройства АПВ с ускорением защиты до АПВ или с кратностью действия (не более трех), возрастающей по направлению к источнику питания.
3.3.22. При применении трехфазного однократного АПВ линий, питающих трансформаторы, со стороны высшего напряжения которых устанавливаются короткозамыкатели и отделители, для отключения отделителя в бестоковую паузу время действия устройства АПВ должно быть отстроено от суммарного времени включения короткозамыкателя и отключения отделителя. При применении трехфазного АПВ двукратного действия (см. 3.3.6) время действия АПВ в первом цикле по указанному условию не должно увеличиваться, если отключение отделителя предусматривается в бестоковую паузу второго цикла АПВ.
Для линий, на которые вместо выключателей устанавливаются отделители, отключение отделителей в случае неуспешного АПВ в первом цикле должно производиться в бестоковую паузу второго цикла АПВ.
3.3.23. Если в результате действия АПВ возможно несинхронное включение синхронных компенсаторов или синхронных электродвигателей и если такое включение для них недопустимо, а также для исключения подпитки от этих машин места повреждения следует предусматривать автоматическое отключение этих синхронных машин при исчезновении питания или переводить их в асинхронный режим отключением АГП с последующим автоматическим включением или ресинхронизацией после восстановления напряжения в результате успешного АПВ.
Для подстанций с синхронными компенсаторами или синхронными электродвигателями должны применяться меры, предотвращающие излишние срабатывания АЧР при действии АПВ.
3.3.24. АПВ шин электростанций и подстанций при наличии специальной защиты шин и выключателей, допускающих АПВ, должно выполняться по одному из двух вариантов:
1) автоматическим опробованием (постановка шин под напряжение выключателем от АПВ одного из питающих элементов);
2) автоматической сборкой схемы; при этом первым от устройства АПВ включается один из питающих элементов (например, линия, трансформатор), при успешном включении этого элемента производится последующее, возможно более полное автоматическое восстановление схемы доаварийного режима путем включения других элементов. АПВ шин по этому варианту рекомендуется применять в первую очередь для подстанций без постоянного дежурства персонала.
При выполнении АПВ шин должны применяться меры, исключающие несинхронное включение (если оно является недопустимым).
Должна обеспечиваться достаточная чувствительность защиты шин на случай неуспешного АПВ.
3.3.25. На двухтрансформаторных понижающих подстанциях при раздельной работе трансформаторов, как правило, должны предусматриваться устройства АПВ шин среднего и низшего напряжений в сочетании с устройствами АВР; при внутренних повреждениях трансформаторов должно действовать АВР, при прочих повреждениях - АПВ (см. 3.3.42).
Допускается для двухтрансформаторной подстанции, в нормальном режиме которой предусматривается параллельная работа трансформаторов на шинах данного напряжения, устанавливать дополнительно к устройству АПВ устройство АВР, предназначенное для режима, когда один из трансформаторов выведен в резерв.
3.3.26. Устройствами АПВ должны быть оборудованы все одиночные понижающие трансформаторы мощностью более 1 MB·А на подстанциях энергосистем, имеющие выключатель и максимальную токовую защиту с питающей стороны, когда отключение трансформатора приводит к обесточению электроустановок потребителей. Допускается в отдельных случаях действие АПВ и при отключении трансформатора защитой от внутренних повреждений.
3.3.27. При неуспешном АПВ включаемого первым выключателем элемента, присоединенного двумя или более выключателями, АПВ остальных выключателей этого элемента, как правило, должно запрещаться.
3.3.28. При наличии на подстанции или электростанции выключателей с электромагнитным приводом, если от устройства АПВ могут быть одновременно включены два или более выключателей, для обеспечения необходимого уровня напряжения аккумуляторной батареи при включении и для снижения сечения кабелей цепей питания электромагнитов включения следует, как правило, выполнять АПВ так, чтобы одновременное включение нескольких выключателей было исключено (например, применением на присоединениях АПВ с различными выдержками времени).
Допускается в отдельных случаях (преимущественно при напряжении 110 кВ и большом числе присоединений, оборудованных АПВ) одновременное включение от АПВ двух выключателей.
3.3.29. Действие устройств АПВ должно фиксироваться указательными реле, встроенными в реле указателями срабатывания, счетчиками числа срабатываний или другими устройствами аналогичного назначения.
[ ПУЭ]Тематики
- высоковольтный аппарат, оборудование...
- релейная защита
- электроснабжение в целом
Обобщающие термины
Синонимы
Сопутствующие термины
- АПВ воздушных линий
- АПВ смешанных (кабельно-воздушных) линий
- двукратное АПВ
- неуспешное АПВ
- однократное АПВ
- трехкратное АПВ
- цикл АПВ
EN
- AR
- ARC
- auto-reclosing
- automatic reclosing
- automatic recluse
- autoreclosing
- autoreclosure
- reclose
- reclosing
- reclosure
DE
- automatische Wiedereinschaltung
- Kurzunterbrechung
- selbsttätiges Wiederschließen (eines mechanischen Schaltgerätes)
- Wiedereinschaltung, automatische
FR
Русско-немецкий словарь нормативно-технической терминологии > автоматическое повторное включение
-
8 автоматическое повторное включение
- reclosure
- reclosing
- reclose
- autoreclosure
- autoreclosing
- automatic recluse
- automatic reclosing
- auto-reclosing
- ARC
- AR
автоматическое повторное включение
АПВ
Коммутационный цикл, при котором выключатель вслед за его отключением автоматически включается через установленный промежуток времени (О - tбт - В).
[ ГОСТ Р 52565-2006]
автоматическое повторное включение
АПВ
Автоматическое включение аварийно отключившегося элемента электрической сети
[ОАО РАО "ЕЭС России" СТО 17330282.27.010.001-2008]
(автоматическое) повторное включение
АПВ
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва]EN
automatic reclosing
automatic reclosing of a circuit-breaker associated with a faulted section of a network after an interval of time which permits that section to recover from a transient fault
[IEC 61936-1, ed. 1.0 (2002-10)]
[IEV 604-02-32]
auto-reclosing
the operating sequence of a mechanical switching device whereby, following its opening, it closes automatically after a predetermined time
[IEC 62271-100, ed. 2.0 (2008-04)]
auto-reclosing (of a mechanical switching device)
the operating sequence of a mechanical switching device whereby, following its opening, it closes automatically after a predetermined time
[IEV number 441-16-10]FR
réenclenchement automatique
refermeture du disjoncteur associé à une fraction de réseau affectée d'un défaut, par un dispositif automatique après un intervalle de temps permettant la disparition d'un défaut fugitif
[IEC 61936-1, ed. 1.0 (2002-10)]
[IEV 604-02-32]
refermeture automatique
séquence de manoeuvres par laquelle, à la suite d’une ouverture, un appareil mécanique de connexion est refermé automatiquement après un intervalle de temps prédéterminé
[IEC 62271-100, ed. 2.0 (2008-04)]
refermeture automatique (d'un appareil mécanique de connexion)
séquence de manoeuvres par laquelle, à la suite d'une ouverture, un appareil mécanique de connexion est refermé automatiquement après un intervalle de temps prédéterminé
[IEV number 441-16-10]
Автоматическое повторное включение (АПВ), быстрое автоматическое обратное включение в работу высоковольтных линий электропередачи и электрооборудования высокого напряжения после их автоматического отключения; одно из наиболее эффективных средств противоаварийной автоматики. Повышает надёжность электроснабжения потребителей и восстанавливает нормальный режим работы электрической системы. Во многих случаях после быстрого отключения участка электрической системы, на котором возникло короткое замыкание в результате кратковременного нарушения изоляции или пробоя воздушного промежутка, при последующей подаче напряжения повторное короткое замыкание не возникает. АПВ выполняется с помощью автоматических устройств, воздействующих на высоковольтные выключатели после их аварийного автоматического отключения от релейной защиты. Многие из этих автоматических устройств обеспечивают АПВ при самопроизвольном отключении выключателей, например при сильных сотрясениях почвы во время близких взрывов, землетрясениях и т. п. Эффективность АПВ тем выше, чем быстрее следует оно за аварийным отключением, т. е. чем меньше время перерыва питания потребителей. Это время зависит от длительности цикла АПВ. В электрических системах применяют однократное АПВ — с одним циклом, двукратное — при неуспешном первом цикле, и трёхкратное — с тремя последовательными циклами. Цикл АПВ — время от момента подачи сигнала на отключение до замыкания цепи главными контактами выключателя — состоит из времени отключения и включения выключателя и времени срабатывания устройства АПВ. Длительность бестоковой паузы, когда потребитель не получает электроэнергию, выбирается такой, чтобы успело произойти восстановление изоляции (деионизация среды) в месте короткого замыкания, привод выключателя после отключения был бы готов к повторному включению, а выключатель к моменту замыкания его главных контактов восстановил способность к отключению поврежденной цепи в случае неуспешного АПВ. Время деионизации зависит от среды, климатических условий и других факторов. Время восстановления отключающей способности выключателя определяется его конструкцией и количеством циклов АПВ., предшествовавших данному. Обычно длительность 1-го цикла не превышает 0,5—1,5 сек, 2-го — от 10 до 15 сек, 3-го — от 60 до 120 сек.
Наиболее распространено однократное АПВ, обеспечивающее на воздушных линиях высокого напряжения (110 кв и выше) до 86 %, а на кабельных линиях (3—10 кв) — до 55 % успешных включений. Двукратное АПВ обеспечивает во втором цикле до 15 % успешных включений. Третий цикл увеличивает число успешных включений всего на 3—5 %. На линиях электропередачи высокого напряжения (от 110 до 500 кВ) применяется однофазовое АПВ; при этом выключатели должны иметь отдельные приводы на каждой фазе.
Применение АПВ экономически выгодно, т. к. стоимость устройств АПВ и их эксплуатации несравнимо меньше ущерба из-за перерыва в подаче электроэнергии.
[ БСЭ]
НАЗНАЧЕНИЕ И ОБЛАСТЬ ПРИМЕНЕНИЯ АПВ
Опыт эксплуатации сетей высокого напряжения показал, что если поврежденную линию электропередачи быстро отключить, т. е. снять с нее напряжение, то в большинстве случаев повреждение ликвидируется. При этом электрическая дуга, возникавшая в месте короткого замыкания (КЗ), не успевает вызвать существенных разрушений оборудования, препятствующих обратному включению линии под напряжение.
Самоустраняющиеся повреждения принято называть неустойчивыми. Такие повреждения возникают в результате грозовых перекрытий изоляции, схлестывания проводов при ветре и сбрасывании гололеда, падения деревьев, задевания проводов движущимися механизмами.
Данные о повреждаемости воздушных линий электропередачи (ВЛ) за многолетний период эксплуатации показывают, что доля неустойчивых повреждений весьма высока и составляет 50—90 %.
При ликвидации аварии оперативный персонал производит обычно опробование линии путем включения ее под напряжение, так как отыскание места повреждения на линии электропередачи путем ее обхода требует длительного времени, а многие повреждения носят неустойчивый характер. Эту операцию называют повторным включением.
Если КЗ самоустранилось, то линия, на которой произошло неустойчивое повреждение, при повторном включении остается в работе. Поэтому повторные включения при неустойчивых повреждениях принято называть успешными.
На ВЛ успешность повторного включения сильно зависит от номинального напряжения линий. На линиях ПО кВ и выше успешность повторного включения значительно выше, чем на ВЛ 6—35 кВ. Высокий процент успешных повторных включений в сетях высокого и сверхвысокого напряжения объясняется быстродействием релейной защиты (как правило, не более 0,1-0,15 с), большим сечением проводов и расстояний между ними, высокой механической прочностью опор. [Овчинников В. В., Автоматическое повторное включение. — М.:Энергоатомиздат, 1986.— 96 с: ил. — (Б-ка электромонтера; Вып. 587). Энергоатомиздат, 1986]
АВТОМАТИЧЕСКОЕ ПОВТОРНОЕ ВКЛЮЧЕНИЕ (АПВ)
3.3.2. Устройства АПВ должны предусматриваться для быстрого восстановления питания потребителей или межсистемных и внутрисистемных связей путем автоматического включения выключателей, отключенных устройствами релейной защиты.
Должно предусматриваться автоматическое повторное включение:
1) воздушных и смешанных (кабельно-воздушных) линий всех типов напряжением выше 1 кВ. Отказ от применения АПВ должен быть в каждом отдельном случае обоснован. На кабельных линиях 35 кВ и ниже АПВ рекомендуется применять в случаях, когда оно может быть эффективным в связи со значительной вероятностью повреждений с образованием открытой дуги (например, наличие нескольких промежуточных сборок, питание по одной линии нескольких подстанций), а также с целью исправления неселективного действия защиты. Вопрос о применении АПВ на кабельных линиях 110 кВ и выше должен решаться при проектировании в каждом отдельном случае с учетом конкретных условий;
2) шин электростанций и подстанций (см. 3.3.24 и 3.3.25);
3) трансформаторов (см. 3.3.26);
4) ответственных электродвигателей, отключаемых для обеспечения самозапуска других электродвигателей (см. 3.3.38).
Для осуществления АПВ по п. 1-3 должны также предусматриваться устройства АПВ на обходных, шиносоединительных и секционных выключателях.
Допускается в целях экономии аппаратуры выполнение устройства группового АПВ на линиях, в первую очередь кабельных, и других присоединениях 6-10 кВ. При этом следует учитывать недостатки устройства группового АПВ, например возможность отказа в случае, если после отключения выключателя одного из присоединений отключение выключателя другого присоединения происходит до возврата устройства АПВ в исходное положение.
3.3.3. Устройства АПВ должны быть выполнены так, чтобы они не действовали при:
1) отключении выключателя персоналом дистанционно или при помощи телеуправления;
2) автоматическом отключении от релейной защиты непосредственно после включения персоналом дистанционно или при помощи телеуправления;
3) отключении выключателя защитой от внутренних повреждений трансформаторов и вращающихся машин, устройствами противоаварийной автоматики, а также в других случаях отключений выключателя, когда действие АПВ недопустимо. АПВ после действия АЧР (ЧАПВ) должно выполняться в соответствии с 3.3.81.
Устройства АПВ должны быть выполнены так, чтобы была исключена возможностью многократного включения на КЗ при любой неисправности в схеме устройства.
Устройства АПВ должны выполняться с автоматическим возвратом.
3.3.4. При применении АПВ должно, как правило, предусматриваться ускорение действия релейной защиты на случай неуспешного АПВ. Ускорение действия релейной защиты после неуспешного АПВ выполняется с помощью устройства ускорения после включения выключателя, которое, как правило, должно использоваться и при включении выключателя по другим причинам (от ключа управления, телеуправления или устройства АВР). При ускорении защиты после включения выключателя должны быть приняты меры против возможного отключения выключателя защитой под действием толчка тока при включении из-за неодновременного включения фаз выключателя.
Не следует ускорять защиты после включения выключателя, когда линия уже включена под напряжение другим своим выключателем (т. е. при наличии симметричного напряжения на линии).
Допускается не ускорять после АПВ действие защит линий 35 кВ и ниже, выполненных на переменном оперативном токе, если для этого требуется значительное усложнение защит и время их действия при металлическом КЗ вблизи места установки не превосходит 1,5 с.
3.3.5. Устройства трехфазного АПВ (ТАПВ) должны осуществляться преимущественно с пуском при несоответствии между ранее поданной оперативной командой и отключенным положением выключателя; допускается также пуск устройства АПВ от защиты.
3.3.6. Могут применяться, как правило, устройства ТАПВ однократного или двукратного действия (последнее - если это допустимо по условиям работы выключателя). Устройство ТАПВ двукратного действия рекомендуется принимать для воздушных линий, в особенности для одиночных с односторонним питанием. В сетях 35 кВ и ниже устройства ТАПВ двукратного действия рекомендуется применять в первую очередь для линий, не имеющих резервирования по сети.
В сетях с изолированной или компенсированной нейтралью, как правило, должна применяться блокировка второго цикла АПВ в случае замыкания на землю после АПВ первого цикла (например, по наличию напряжений нулевой последовательности). Выдержка времени ТАПВ во втором цикле должна быть не менее 15-20 с.
3.3.7. Для ускорения восстановления нормального режима работы электропередачи выдержка времени устройства ТАПВ (в особенности для первого цикла АПВ двукратного действия на линиях с односторонним питанием) должна приниматься минимально возможной с учетом времени погасания дуги и деионизации среды в месте повреждения, а также с учетом времени готовности выключателя и его привода к повторному включению.
Выдержка времени устройства ТАПВ на линии с двусторонним питанием должна выбираться также с учетом возможного неодновременного отключения повреждения с обоих концов линии; при этом время действия защит, предназначенных для дальнего резервирования, учитываться не должно. Допускается не учитывать разновременности отключения выключателей по концам линии, когда они отключаются в результате срабатывания высокочастотной защиты.
С целью повышения эффективности ТАПВ однократного действия допускается увеличивать его выдержку времени (по возможности с учетом работы потребителя).
3.3.8. На одиночных линиях 110 кВ и выше с односторонним питанием, для которых допустим в случае неуспешного ТАПВ переход на длительную работу двумя фазами, следует предусматривать ТАПВ двукратного действия на питающем конце линии. Перевод линии на работу двумя фазами может производиться персоналом на месте или при помощи телеуправления.
Для перевода линии после неуспешного АПВ на работу двумя фазами следует предусматривать пофазное управление разъединителями или выключателями на питающем и приемном концах линии.
При переводе линии на длительную работу двумя фазами следует при необходимости принимать меры к уменьшению помех в работе линий связи из-за неполнофазного режима работы линии. С этой целью допускается ограничение мощности, передаваемой по линии в неполнофазном режиме (если это возможно по условиям работы потребителя).
В отдельных случаях при наличии специального обоснования допускается также перерыв в работе линии связи на время неполнофазного режима.
3.3.9. На линиях, отключение которых не приводит к нарушению электрической связи между генерирующими источниками, например на параллельных линиях с односторонним питанием, следует устанавливать устройства ТАПВ без проверки синхронизма.
3.3.10. На одиночных линиях с двусторонним питанием (при отсутствии шунтирующих связей) должен предусматриваться один из следующих видов трехфазного АПВ (или их комбинаций):
а) быстродействующее ТАПВ (БАПВ)
б) несинхронное ТАПВ (НАПВ);
в) ТАПВ с улавливанием синхронизма (ТАПВ УС).
Кроме того, может предусматриваться однофазное АПВ (ОАПВ) в сочетании с различными видами ТАПВ, если выключатели оборудованы пофазным управлением и не нарушается устойчивость параллельной работы частей энергосистемы в цикле ОАПВ.
Выбор видов АПВ производится, исходя из совокупности конкретных условий работы системы и оборудования с учетом указаний 3.3.11-3.3.15.
3.3.11. Быстродействующее АПВ, или БАПВ (одновременное включение с минимальной выдержкой времени с обоих концов), рекомендуется предусматривать на линиях по 3.3.10 для автоматического повторного включения, как правило, при небольшом расхождении угла между векторами ЭДС соединяемых систем. БАПВ может применяться при наличии выключателей, допускающих БАПВ, если после включения обеспечивается сохранение синхронной параллельной работы систем и максимальный электромагнитный момент синхронных генераторов и компенсаторов меньше (с учетом необходимого запаса) электромагнитного момента, возникающего при трехфазном КЗ на выводах машины.
Оценка максимального электромагнитного момента должна производиться для предельно возможного расхождения угла за время БАПВ. Соответственно запуск БАПВ должен производиться лишь при срабатывании быстродействующей защиты, зона действия которой охватывает всю линию. БАПВ должно блокироваться при срабатывании резервных защит и блокироваться или задерживаться при работе УРОВ.
Если для сохранения устойчивости энергосистемы при неуспешном БАПВ требуется большой объем воздействий от противоаварийной автоматики, применение БАПВ не рекомендуется.
3.3.12. Несинхронное АПВ (НАПВ) может применяться на линиях по 3.3.10 (в основном 110-220 кВ), если:
а) максимальный электромагнитный момент синхронных генераторов и компенсаторов, возникающий при несинхронном включении, меньше (с учетом необходимого запаса) электромагнитного момента, возникающего при трехфазном КЗ на выводах машины, при этом в качестве практических критериев оценки допустимости НАПВ принимаются расчетные начальные значения периодических составляющих токов статора при угле включения 180°;
б) максимальный ток через трансформатор (автотрансформатор) при угле включения 180° меньше тока КЗ на его выводах при питании от шин бесконечной мощности;
в) после АПВ обеспечивается достаточно быстрая ресинхронизация; если в результате несинхронного автоматического повторного включения возможно возникновение длительного асинхронного хода, должны применяться специальные мероприятия для его предотвращения или прекращения.
При соблюдении этих условий НАПВ допускается применять также в режиме ремонта на параллельных линиях.
При выполнении НАПВ необходимо принять меры по предотвращению излишнего срабатывания защиты. С этой целью рекомендуется, в частности, осуществлять включение выключателей при НАПВ в определенной последовательности, например выполнением АПВ с одной из сторон линии с контролем наличия напряжения на ней после успешного ТАПВ с противоположной стороны.
3.3.13. АПВ с улавливанием синхронизма может применяться на линиях по 3.3.10 для включения линии при значительных (примерно до 4%) скольжениях и допустимом угле.
Возможно также следующее выполнение АПВ. На конце линии, который должен включаться первым, производится ускоренное ТАПВ (с фиксацией срабатывания быстродействующей защиты, зона действия которой охватывает всю линию) без контроля напряжения на линии (УТАПВ БК) или ТАПВ с контролем отсутствия напряжения на линии (ТАПВ ОН), а на другом ее конце - ТАПВ с улавливанием синхронизма. Последнее производится при условии, что включение первого конца было успешным (это может быть определено, например, при помощи контроля наличия напряжения на линии).
Для улавливания синхронизма могут применяться устройства, построенные по принципу синхронизатора с постоянным углом опережения.
Устройства АПВ следует выполнять так, чтобы имелась возможность изменять очередность включения выключателей по концам линии.
При выполнении устройства АПВ УС необходимо стремиться к обеспечению его действия при возможно большей разности частот. Максимальный допустимый угол включения при применении АПВ УС должен приниматься с учетом условий, указанных в 3.3.12. При применении устройства АПВ УС рекомендуется его использование для включения линии персоналом (полуавтоматическая синхронизация).
3.3.14. На линиях, оборудованных трансформаторами напряжения, для контроля отсутствия напряжения (КОН) и контроля наличия напряжения (КНН) на линии при различных видах ТАПВ рекомендуется использовать органы, реагирующие на линейное (фазное) напряжение и на напряжения обратной и нулевой последовательностей. В некоторых случаях, например на линиях без шунтирующих реакторов, можно не использовать напряжение нулевой последовательности.
3.3.15. Однофазное автоматическое повторное включение (ОАПВ) может применяться только в сетях с большим током замыкания на землю. ОАПВ без автоматического перевода линии на длительный неполнофазный режим при устойчивом повреждении фазы следует применять:
а) на одиночных сильно нагруженных межсистемных или внутрисистемных линиях электропередачи;
б) на сильно нагруженных межсистемных линиях 220 кВ и выше с двумя и более обходными связями при условии, что отключение одной из них может привести к нарушению динамической устойчивости энергосистемы;
в) на межсистемных и внутрисистемных линиях разных классов напряжения, если трехфазное отключение линии высшего напряжения может привести к недопустимой перегрузке линий низшего напряжения с возможностью нарушения устойчивости энергосистемы;
г) на линиях, связывающих с системой крупные блочные электростанции без значительной местной нагрузки;
д) на линиях электропередачи, где осуществление ТАПВ сопряжено со значительным сбросом нагрузки вследствие понижения напряжения.
Устройство ОАПВ должно выполняться так, чтобы при выводе его из работы или исчезновении питания автоматически осуществлялся перевод действия защит линии на отключение трех фаз помимо устройства.
Выбор поврежденных фаз при КЗ на землю должен осуществляться при помощи избирательных органов, которые могут быть также использованы в качестве дополнительной быстродействующей защиты линии в цикле ОАПВ, при ТАПВ, БАПВ и одностороннем включении линии оперативным персоналом.
Выдержка временем ОАПВ должна отстраиваться от времени погасания дуги и деионизации среды в месте однофазного КЗ в неполнофазном режиме с учетом возможности неодновременного срабатывания защиты по концам линии, а также каскадного действия избирательных органов.
3.3.16. На линиях по 3.3.15 ОАПВ должно применяться в сочетании с различными видами ТАПВ. При этом должна быть предусмотрена возможность запрета ТАПВ во всех случаях ОАПВ или только при неуспешном ОАПВ. В зависимости от конкретных условий допускается осуществление ТАПВ после неуспешного ОАПВ. В этих случаях предусматривается действие ТАПВ сначала на одном конце линии с контролем отсутствия напряжения на линии и с увеличенной выдержкой времени.
3.3.17. На одиночных линиях с двусторонним питанием, связывающих систему с электростанцией небольшой мощности, могут применяться ТАПВ с автоматической самосинхронизацией (АПВС) гидрогенераторов для гидроэлектростанций и ТАПВ в сочетании с делительными устройствами - для гидро- и теплоэлектростанций.
3.3.18. На линиях с двусторонним питанием при наличии нескольких обходных связей следует применять:
1) при наличии двух связей, а также при наличии трех связей, если вероятно одновременное длительное отключение двух из этих связей (например, двухцепной линии):
несинхронное АПВ (в основном для линий 110-220 кВ и при соблюдении условий, указанных в 3.3.12, но для случая отключения всех связей);
АПВ с проверкой синхронизма (при невозможности выполнения несинхронного АПВ по причинам, указанным в 3.3.12, но для случая отключения всех связей).
Для ответственных линий при наличии двух связей, а также при наличии трех связей, две из которых - двухцепная линия, при невозможности применения НАПВ по причинам, указанным в 3.3.12, разрешается применять устройства ОАПВ, БАПВ или АПВ УС (см. 3.3.11, 3.3.13, 3.3.15). При этом устройства ОАПВ и БАПВ следует дополнять устройством АПВ с проверкой синхронизма;
2) при наличии четырех и более связей, а также при наличии трех связей, если в последнем случае одновременное длительное отключение двух из этих связей маловероятно (например, если все линии одноцепные), - АПВ без проверки синхронизма.
3.3.19. Устройства АПВ с проверкой синхронизма следует выполнять на одном конце линии с контролем отсутствия напряжения на линии и с контролем наличия синхронизма, на другом конце - только с контролем наличия синхронизма. Схемы устройства АПВ с проверкой синхронизма линии должны выполняться одинаковыми на обоих концах с учетом возможности изменения очередности включения выключателей линии при АПВ.
Рекомендуется использовать устройство АПВ с проверкой синхронизма для проверки синхронизма соединяемых систем при включении линии персоналом.
3.3.20. Допускается совместное применение нескольких видов трехфазного АПВ на линии, например БАПВ и ТАПВ с проверкой синхронизма. Допускается также использовать различные виды устройств АПВ на разных концах линии, например УТАПВ БК (см. 3.3.13) на одном конце линии и ТАПВ с контролем наличия напряжения и синхронизма на другом.
3.3.21. Допускается сочетание ТАПВ с неселективными быстродействующими защитами для исправления неселективного действия последних. В сетях, состоящих из ряда последовательно включенных линий, при применении для них неселективных быстродействующих защит для исправления их действия рекомендуется применять поочередное АПВ; могут также применяться устройства АПВ с ускорением защиты до АПВ или с кратностью действия (не более трех), возрастающей по направлению к источнику питания.
3.3.22. При применении трехфазного однократного АПВ линий, питающих трансформаторы, со стороны высшего напряжения которых устанавливаются короткозамыкатели и отделители, для отключения отделителя в бестоковую паузу время действия устройства АПВ должно быть отстроено от суммарного времени включения короткозамыкателя и отключения отделителя. При применении трехфазного АПВ двукратного действия (см. 3.3.6) время действия АПВ в первом цикле по указанному условию не должно увеличиваться, если отключение отделителя предусматривается в бестоковую паузу второго цикла АПВ.
Для линий, на которые вместо выключателей устанавливаются отделители, отключение отделителей в случае неуспешного АПВ в первом цикле должно производиться в бестоковую паузу второго цикла АПВ.
3.3.23. Если в результате действия АПВ возможно несинхронное включение синхронных компенсаторов или синхронных электродвигателей и если такое включение для них недопустимо, а также для исключения подпитки от этих машин места повреждения следует предусматривать автоматическое отключение этих синхронных машин при исчезновении питания или переводить их в асинхронный режим отключением АГП с последующим автоматическим включением или ресинхронизацией после восстановления напряжения в результате успешного АПВ.
Для подстанций с синхронными компенсаторами или синхронными электродвигателями должны применяться меры, предотвращающие излишние срабатывания АЧР при действии АПВ.
3.3.24. АПВ шин электростанций и подстанций при наличии специальной защиты шин и выключателей, допускающих АПВ, должно выполняться по одному из двух вариантов:
1) автоматическим опробованием (постановка шин под напряжение выключателем от АПВ одного из питающих элементов);
2) автоматической сборкой схемы; при этом первым от устройства АПВ включается один из питающих элементов (например, линия, трансформатор), при успешном включении этого элемента производится последующее, возможно более полное автоматическое восстановление схемы доаварийного режима путем включения других элементов. АПВ шин по этому варианту рекомендуется применять в первую очередь для подстанций без постоянного дежурства персонала.
При выполнении АПВ шин должны применяться меры, исключающие несинхронное включение (если оно является недопустимым).
Должна обеспечиваться достаточная чувствительность защиты шин на случай неуспешного АПВ.
3.3.25. На двухтрансформаторных понижающих подстанциях при раздельной работе трансформаторов, как правило, должны предусматриваться устройства АПВ шин среднего и низшего напряжений в сочетании с устройствами АВР; при внутренних повреждениях трансформаторов должно действовать АВР, при прочих повреждениях - АПВ (см. 3.3.42).
Допускается для двухтрансформаторной подстанции, в нормальном режиме которой предусматривается параллельная работа трансформаторов на шинах данного напряжения, устанавливать дополнительно к устройству АПВ устройство АВР, предназначенное для режима, когда один из трансформаторов выведен в резерв.
3.3.26. Устройствами АПВ должны быть оборудованы все одиночные понижающие трансформаторы мощностью более 1 MB·А на подстанциях энергосистем, имеющие выключатель и максимальную токовую защиту с питающей стороны, когда отключение трансформатора приводит к обесточению электроустановок потребителей. Допускается в отдельных случаях действие АПВ и при отключении трансформатора защитой от внутренних повреждений.
3.3.27. При неуспешном АПВ включаемого первым выключателем элемента, присоединенного двумя или более выключателями, АПВ остальных выключателей этого элемента, как правило, должно запрещаться.
3.3.28. При наличии на подстанции или электростанции выключателей с электромагнитным приводом, если от устройства АПВ могут быть одновременно включены два или более выключателей, для обеспечения необходимого уровня напряжения аккумуляторной батареи при включении и для снижения сечения кабелей цепей питания электромагнитов включения следует, как правило, выполнять АПВ так, чтобы одновременное включение нескольких выключателей было исключено (например, применением на присоединениях АПВ с различными выдержками времени).
Допускается в отдельных случаях (преимущественно при напряжении 110 кВ и большом числе присоединений, оборудованных АПВ) одновременное включение от АПВ двух выключателей.
3.3.29. Действие устройств АПВ должно фиксироваться указательными реле, встроенными в реле указателями срабатывания, счетчиками числа срабатываний или другими устройствами аналогичного назначения.
[ ПУЭ]Тематики
- высоковольтный аппарат, оборудование...
- релейная защита
- электроснабжение в целом
Обобщающие термины
Синонимы
Сопутствующие термины
- АПВ воздушных линий
- АПВ смешанных (кабельно-воздушных) линий
- двукратное АПВ
- неуспешное АПВ
- однократное АПВ
- трехкратное АПВ
- цикл АПВ
EN
- AR
- ARC
- auto-reclosing
- automatic reclosing
- automatic recluse
- autoreclosing
- autoreclosure
- reclose
- reclosing
- reclosure
DE
- automatische Wiedereinschaltung
- Kurzunterbrechung
- selbsttätiges Wiederschließen (eines mechanischen Schaltgerätes)
- Wiedereinschaltung, automatische
FR
Русско-английский словарь нормативно-технической терминологии > автоматическое повторное включение
-
9 автоматическое повторное включение
автоматическое повторное включение
АПВ
Коммутационный цикл, при котором выключатель вслед за его отключением автоматически включается через установленный промежуток времени (О - tбт - В).
[ ГОСТ Р 52565-2006]
автоматическое повторное включение
АПВ
Автоматическое включение аварийно отключившегося элемента электрической сети
[ОАО РАО "ЕЭС России" СТО 17330282.27.010.001-2008]
(автоматическое) повторное включение
АПВ
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва]EN
automatic reclosing
automatic reclosing of a circuit-breaker associated with a faulted section of a network after an interval of time which permits that section to recover from a transient fault
[IEC 61936-1, ed. 1.0 (2002-10)]
[IEV 604-02-32]
auto-reclosing
the operating sequence of a mechanical switching device whereby, following its opening, it closes automatically after a predetermined time
[IEC 62271-100, ed. 2.0 (2008-04)]
auto-reclosing (of a mechanical switching device)
the operating sequence of a mechanical switching device whereby, following its opening, it closes automatically after a predetermined time
[IEV number 441-16-10]FR
réenclenchement automatique
refermeture du disjoncteur associé à une fraction de réseau affectée d'un défaut, par un dispositif automatique après un intervalle de temps permettant la disparition d'un défaut fugitif
[IEC 61936-1, ed. 1.0 (2002-10)]
[IEV 604-02-32]
refermeture automatique
séquence de manoeuvres par laquelle, à la suite d’une ouverture, un appareil mécanique de connexion est refermé automatiquement après un intervalle de temps prédéterminé
[IEC 62271-100, ed. 2.0 (2008-04)]
refermeture automatique (d'un appareil mécanique de connexion)
séquence de manoeuvres par laquelle, à la suite d'une ouverture, un appareil mécanique de connexion est refermé automatiquement après un intervalle de temps prédéterminé
[IEV number 441-16-10]
Автоматическое повторное включение (АПВ), быстрое автоматическое обратное включение в работу высоковольтных линий электропередачи и электрооборудования высокого напряжения после их автоматического отключения; одно из наиболее эффективных средств противоаварийной автоматики. Повышает надёжность электроснабжения потребителей и восстанавливает нормальный режим работы электрической системы. Во многих случаях после быстрого отключения участка электрической системы, на котором возникло короткое замыкание в результате кратковременного нарушения изоляции или пробоя воздушного промежутка, при последующей подаче напряжения повторное короткое замыкание не возникает. АПВ выполняется с помощью автоматических устройств, воздействующих на высоковольтные выключатели после их аварийного автоматического отключения от релейной защиты. Многие из этих автоматических устройств обеспечивают АПВ при самопроизвольном отключении выключателей, например при сильных сотрясениях почвы во время близких взрывов, землетрясениях и т. п. Эффективность АПВ тем выше, чем быстрее следует оно за аварийным отключением, т. е. чем меньше время перерыва питания потребителей. Это время зависит от длительности цикла АПВ. В электрических системах применяют однократное АПВ — с одним циклом, двукратное — при неуспешном первом цикле, и трёхкратное — с тремя последовательными циклами. Цикл АПВ — время от момента подачи сигнала на отключение до замыкания цепи главными контактами выключателя — состоит из времени отключения и включения выключателя и времени срабатывания устройства АПВ. Длительность бестоковой паузы, когда потребитель не получает электроэнергию, выбирается такой, чтобы успело произойти восстановление изоляции (деионизация среды) в месте короткого замыкания, привод выключателя после отключения был бы готов к повторному включению, а выключатель к моменту замыкания его главных контактов восстановил способность к отключению поврежденной цепи в случае неуспешного АПВ. Время деионизации зависит от среды, климатических условий и других факторов. Время восстановления отключающей способности выключателя определяется его конструкцией и количеством циклов АПВ., предшествовавших данному. Обычно длительность 1-го цикла не превышает 0,5—1,5 сек, 2-го — от 10 до 15 сек, 3-го — от 60 до 120 сек.
Наиболее распространено однократное АПВ, обеспечивающее на воздушных линиях высокого напряжения (110 кв и выше) до 86 %, а на кабельных линиях (3—10 кв) — до 55 % успешных включений. Двукратное АПВ обеспечивает во втором цикле до 15 % успешных включений. Третий цикл увеличивает число успешных включений всего на 3—5 %. На линиях электропередачи высокого напряжения (от 110 до 500 кВ) применяется однофазовое АПВ; при этом выключатели должны иметь отдельные приводы на каждой фазе.
Применение АПВ экономически выгодно, т. к. стоимость устройств АПВ и их эксплуатации несравнимо меньше ущерба из-за перерыва в подаче электроэнергии.
[ БСЭ]
НАЗНАЧЕНИЕ И ОБЛАСТЬ ПРИМЕНЕНИЯ АПВ
Опыт эксплуатации сетей высокого напряжения показал, что если поврежденную линию электропередачи быстро отключить, т. е. снять с нее напряжение, то в большинстве случаев повреждение ликвидируется. При этом электрическая дуга, возникавшая в месте короткого замыкания (КЗ), не успевает вызвать существенных разрушений оборудования, препятствующих обратному включению линии под напряжение.
Самоустраняющиеся повреждения принято называть неустойчивыми. Такие повреждения возникают в результате грозовых перекрытий изоляции, схлестывания проводов при ветре и сбрасывании гололеда, падения деревьев, задевания проводов движущимися механизмами.
Данные о повреждаемости воздушных линий электропередачи (ВЛ) за многолетний период эксплуатации показывают, что доля неустойчивых повреждений весьма высока и составляет 50—90 %.
При ликвидации аварии оперативный персонал производит обычно опробование линии путем включения ее под напряжение, так как отыскание места повреждения на линии электропередачи путем ее обхода требует длительного времени, а многие повреждения носят неустойчивый характер. Эту операцию называют повторным включением.
Если КЗ самоустранилось, то линия, на которой произошло неустойчивое повреждение, при повторном включении остается в работе. Поэтому повторные включения при неустойчивых повреждениях принято называть успешными.
На ВЛ успешность повторного включения сильно зависит от номинального напряжения линий. На линиях ПО кВ и выше успешность повторного включения значительно выше, чем на ВЛ 6—35 кВ. Высокий процент успешных повторных включений в сетях высокого и сверхвысокого напряжения объясняется быстродействием релейной защиты (как правило, не более 0,1-0,15 с), большим сечением проводов и расстояний между ними, высокой механической прочностью опор. [Овчинников В. В., Автоматическое повторное включение. — М.:Энергоатомиздат, 1986.— 96 с: ил. — (Б-ка электромонтера; Вып. 587). Энергоатомиздат, 1986]
АВТОМАТИЧЕСКОЕ ПОВТОРНОЕ ВКЛЮЧЕНИЕ (АПВ)
3.3.2. Устройства АПВ должны предусматриваться для быстрого восстановления питания потребителей или межсистемных и внутрисистемных связей путем автоматического включения выключателей, отключенных устройствами релейной защиты.
Должно предусматриваться автоматическое повторное включение:
1) воздушных и смешанных (кабельно-воздушных) линий всех типов напряжением выше 1 кВ. Отказ от применения АПВ должен быть в каждом отдельном случае обоснован. На кабельных линиях 35 кВ и ниже АПВ рекомендуется применять в случаях, когда оно может быть эффективным в связи со значительной вероятностью повреждений с образованием открытой дуги (например, наличие нескольких промежуточных сборок, питание по одной линии нескольких подстанций), а также с целью исправления неселективного действия защиты. Вопрос о применении АПВ на кабельных линиях 110 кВ и выше должен решаться при проектировании в каждом отдельном случае с учетом конкретных условий;
2) шин электростанций и подстанций (см. 3.3.24 и 3.3.25);
3) трансформаторов (см. 3.3.26);
4) ответственных электродвигателей, отключаемых для обеспечения самозапуска других электродвигателей (см. 3.3.38).
Для осуществления АПВ по п. 1-3 должны также предусматриваться устройства АПВ на обходных, шиносоединительных и секционных выключателях.
Допускается в целях экономии аппаратуры выполнение устройства группового АПВ на линиях, в первую очередь кабельных, и других присоединениях 6-10 кВ. При этом следует учитывать недостатки устройства группового АПВ, например возможность отказа в случае, если после отключения выключателя одного из присоединений отключение выключателя другого присоединения происходит до возврата устройства АПВ в исходное положение.
3.3.3. Устройства АПВ должны быть выполнены так, чтобы они не действовали при:
1) отключении выключателя персоналом дистанционно или при помощи телеуправления;
2) автоматическом отключении от релейной защиты непосредственно после включения персоналом дистанционно или при помощи телеуправления;
3) отключении выключателя защитой от внутренних повреждений трансформаторов и вращающихся машин, устройствами противоаварийной автоматики, а также в других случаях отключений выключателя, когда действие АПВ недопустимо. АПВ после действия АЧР (ЧАПВ) должно выполняться в соответствии с 3.3.81.
Устройства АПВ должны быть выполнены так, чтобы была исключена возможностью многократного включения на КЗ при любой неисправности в схеме устройства.
Устройства АПВ должны выполняться с автоматическим возвратом.
3.3.4. При применении АПВ должно, как правило, предусматриваться ускорение действия релейной защиты на случай неуспешного АПВ. Ускорение действия релейной защиты после неуспешного АПВ выполняется с помощью устройства ускорения после включения выключателя, которое, как правило, должно использоваться и при включении выключателя по другим причинам (от ключа управления, телеуправления или устройства АВР). При ускорении защиты после включения выключателя должны быть приняты меры против возможного отключения выключателя защитой под действием толчка тока при включении из-за неодновременного включения фаз выключателя.
Не следует ускорять защиты после включения выключателя, когда линия уже включена под напряжение другим своим выключателем (т. е. при наличии симметричного напряжения на линии).
Допускается не ускорять после АПВ действие защит линий 35 кВ и ниже, выполненных на переменном оперативном токе, если для этого требуется значительное усложнение защит и время их действия при металлическом КЗ вблизи места установки не превосходит 1,5 с.
3.3.5. Устройства трехфазного АПВ (ТАПВ) должны осуществляться преимущественно с пуском при несоответствии между ранее поданной оперативной командой и отключенным положением выключателя; допускается также пуск устройства АПВ от защиты.
3.3.6. Могут применяться, как правило, устройства ТАПВ однократного или двукратного действия (последнее - если это допустимо по условиям работы выключателя). Устройство ТАПВ двукратного действия рекомендуется принимать для воздушных линий, в особенности для одиночных с односторонним питанием. В сетях 35 кВ и ниже устройства ТАПВ двукратного действия рекомендуется применять в первую очередь для линий, не имеющих резервирования по сети.
В сетях с изолированной или компенсированной нейтралью, как правило, должна применяться блокировка второго цикла АПВ в случае замыкания на землю после АПВ первого цикла (например, по наличию напряжений нулевой последовательности). Выдержка времени ТАПВ во втором цикле должна быть не менее 15-20 с.
3.3.7. Для ускорения восстановления нормального режима работы электропередачи выдержка времени устройства ТАПВ (в особенности для первого цикла АПВ двукратного действия на линиях с односторонним питанием) должна приниматься минимально возможной с учетом времени погасания дуги и деионизации среды в месте повреждения, а также с учетом времени готовности выключателя и его привода к повторному включению.
Выдержка времени устройства ТАПВ на линии с двусторонним питанием должна выбираться также с учетом возможного неодновременного отключения повреждения с обоих концов линии; при этом время действия защит, предназначенных для дальнего резервирования, учитываться не должно. Допускается не учитывать разновременности отключения выключателей по концам линии, когда они отключаются в результате срабатывания высокочастотной защиты.
С целью повышения эффективности ТАПВ однократного действия допускается увеличивать его выдержку времени (по возможности с учетом работы потребителя).
3.3.8. На одиночных линиях 110 кВ и выше с односторонним питанием, для которых допустим в случае неуспешного ТАПВ переход на длительную работу двумя фазами, следует предусматривать ТАПВ двукратного действия на питающем конце линии. Перевод линии на работу двумя фазами может производиться персоналом на месте или при помощи телеуправления.
Для перевода линии после неуспешного АПВ на работу двумя фазами следует предусматривать пофазное управление разъединителями или выключателями на питающем и приемном концах линии.
При переводе линии на длительную работу двумя фазами следует при необходимости принимать меры к уменьшению помех в работе линий связи из-за неполнофазного режима работы линии. С этой целью допускается ограничение мощности, передаваемой по линии в неполнофазном режиме (если это возможно по условиям работы потребителя).
В отдельных случаях при наличии специального обоснования допускается также перерыв в работе линии связи на время неполнофазного режима.
3.3.9. На линиях, отключение которых не приводит к нарушению электрической связи между генерирующими источниками, например на параллельных линиях с односторонним питанием, следует устанавливать устройства ТАПВ без проверки синхронизма.
3.3.10. На одиночных линиях с двусторонним питанием (при отсутствии шунтирующих связей) должен предусматриваться один из следующих видов трехфазного АПВ (или их комбинаций):
а) быстродействующее ТАПВ (БАПВ)
б) несинхронное ТАПВ (НАПВ);
в) ТАПВ с улавливанием синхронизма (ТАПВ УС).
Кроме того, может предусматриваться однофазное АПВ (ОАПВ) в сочетании с различными видами ТАПВ, если выключатели оборудованы пофазным управлением и не нарушается устойчивость параллельной работы частей энергосистемы в цикле ОАПВ.
Выбор видов АПВ производится, исходя из совокупности конкретных условий работы системы и оборудования с учетом указаний 3.3.11-3.3.15.
3.3.11. Быстродействующее АПВ, или БАПВ (одновременное включение с минимальной выдержкой времени с обоих концов), рекомендуется предусматривать на линиях по 3.3.10 для автоматического повторного включения, как правило, при небольшом расхождении угла между векторами ЭДС соединяемых систем. БАПВ может применяться при наличии выключателей, допускающих БАПВ, если после включения обеспечивается сохранение синхронной параллельной работы систем и максимальный электромагнитный момент синхронных генераторов и компенсаторов меньше (с учетом необходимого запаса) электромагнитного момента, возникающего при трехфазном КЗ на выводах машины.
Оценка максимального электромагнитного момента должна производиться для предельно возможного расхождения угла за время БАПВ. Соответственно запуск БАПВ должен производиться лишь при срабатывании быстродействующей защиты, зона действия которой охватывает всю линию. БАПВ должно блокироваться при срабатывании резервных защит и блокироваться или задерживаться при работе УРОВ.
Если для сохранения устойчивости энергосистемы при неуспешном БАПВ требуется большой объем воздействий от противоаварийной автоматики, применение БАПВ не рекомендуется.
3.3.12. Несинхронное АПВ (НАПВ) может применяться на линиях по 3.3.10 (в основном 110-220 кВ), если:
а) максимальный электромагнитный момент синхронных генераторов и компенсаторов, возникающий при несинхронном включении, меньше (с учетом необходимого запаса) электромагнитного момента, возникающего при трехфазном КЗ на выводах машины, при этом в качестве практических критериев оценки допустимости НАПВ принимаются расчетные начальные значения периодических составляющих токов статора при угле включения 180°;
б) максимальный ток через трансформатор (автотрансформатор) при угле включения 180° меньше тока КЗ на его выводах при питании от шин бесконечной мощности;
в) после АПВ обеспечивается достаточно быстрая ресинхронизация; если в результате несинхронного автоматического повторного включения возможно возникновение длительного асинхронного хода, должны применяться специальные мероприятия для его предотвращения или прекращения.
При соблюдении этих условий НАПВ допускается применять также в режиме ремонта на параллельных линиях.
При выполнении НАПВ необходимо принять меры по предотвращению излишнего срабатывания защиты. С этой целью рекомендуется, в частности, осуществлять включение выключателей при НАПВ в определенной последовательности, например выполнением АПВ с одной из сторон линии с контролем наличия напряжения на ней после успешного ТАПВ с противоположной стороны.
3.3.13. АПВ с улавливанием синхронизма может применяться на линиях по 3.3.10 для включения линии при значительных (примерно до 4%) скольжениях и допустимом угле.
Возможно также следующее выполнение АПВ. На конце линии, который должен включаться первым, производится ускоренное ТАПВ (с фиксацией срабатывания быстродействующей защиты, зона действия которой охватывает всю линию) без контроля напряжения на линии (УТАПВ БК) или ТАПВ с контролем отсутствия напряжения на линии (ТАПВ ОН), а на другом ее конце - ТАПВ с улавливанием синхронизма. Последнее производится при условии, что включение первого конца было успешным (это может быть определено, например, при помощи контроля наличия напряжения на линии).
Для улавливания синхронизма могут применяться устройства, построенные по принципу синхронизатора с постоянным углом опережения.
Устройства АПВ следует выполнять так, чтобы имелась возможность изменять очередность включения выключателей по концам линии.
При выполнении устройства АПВ УС необходимо стремиться к обеспечению его действия при возможно большей разности частот. Максимальный допустимый угол включения при применении АПВ УС должен приниматься с учетом условий, указанных в 3.3.12. При применении устройства АПВ УС рекомендуется его использование для включения линии персоналом (полуавтоматическая синхронизация).
3.3.14. На линиях, оборудованных трансформаторами напряжения, для контроля отсутствия напряжения (КОН) и контроля наличия напряжения (КНН) на линии при различных видах ТАПВ рекомендуется использовать органы, реагирующие на линейное (фазное) напряжение и на напряжения обратной и нулевой последовательностей. В некоторых случаях, например на линиях без шунтирующих реакторов, можно не использовать напряжение нулевой последовательности.
3.3.15. Однофазное автоматическое повторное включение (ОАПВ) может применяться только в сетях с большим током замыкания на землю. ОАПВ без автоматического перевода линии на длительный неполнофазный режим при устойчивом повреждении фазы следует применять:
а) на одиночных сильно нагруженных межсистемных или внутрисистемных линиях электропередачи;
б) на сильно нагруженных межсистемных линиях 220 кВ и выше с двумя и более обходными связями при условии, что отключение одной из них может привести к нарушению динамической устойчивости энергосистемы;
в) на межсистемных и внутрисистемных линиях разных классов напряжения, если трехфазное отключение линии высшего напряжения может привести к недопустимой перегрузке линий низшего напряжения с возможностью нарушения устойчивости энергосистемы;
г) на линиях, связывающих с системой крупные блочные электростанции без значительной местной нагрузки;
д) на линиях электропередачи, где осуществление ТАПВ сопряжено со значительным сбросом нагрузки вследствие понижения напряжения.
Устройство ОАПВ должно выполняться так, чтобы при выводе его из работы или исчезновении питания автоматически осуществлялся перевод действия защит линии на отключение трех фаз помимо устройства.
Выбор поврежденных фаз при КЗ на землю должен осуществляться при помощи избирательных органов, которые могут быть также использованы в качестве дополнительной быстродействующей защиты линии в цикле ОАПВ, при ТАПВ, БАПВ и одностороннем включении линии оперативным персоналом.
Выдержка временем ОАПВ должна отстраиваться от времени погасания дуги и деионизации среды в месте однофазного КЗ в неполнофазном режиме с учетом возможности неодновременного срабатывания защиты по концам линии, а также каскадного действия избирательных органов.
3.3.16. На линиях по 3.3.15 ОАПВ должно применяться в сочетании с различными видами ТАПВ. При этом должна быть предусмотрена возможность запрета ТАПВ во всех случаях ОАПВ или только при неуспешном ОАПВ. В зависимости от конкретных условий допускается осуществление ТАПВ после неуспешного ОАПВ. В этих случаях предусматривается действие ТАПВ сначала на одном конце линии с контролем отсутствия напряжения на линии и с увеличенной выдержкой времени.
3.3.17. На одиночных линиях с двусторонним питанием, связывающих систему с электростанцией небольшой мощности, могут применяться ТАПВ с автоматической самосинхронизацией (АПВС) гидрогенераторов для гидроэлектростанций и ТАПВ в сочетании с делительными устройствами - для гидро- и теплоэлектростанций.
3.3.18. На линиях с двусторонним питанием при наличии нескольких обходных связей следует применять:
1) при наличии двух связей, а также при наличии трех связей, если вероятно одновременное длительное отключение двух из этих связей (например, двухцепной линии):
несинхронное АПВ (в основном для линий 110-220 кВ и при соблюдении условий, указанных в 3.3.12, но для случая отключения всех связей);
АПВ с проверкой синхронизма (при невозможности выполнения несинхронного АПВ по причинам, указанным в 3.3.12, но для случая отключения всех связей).
Для ответственных линий при наличии двух связей, а также при наличии трех связей, две из которых - двухцепная линия, при невозможности применения НАПВ по причинам, указанным в 3.3.12, разрешается применять устройства ОАПВ, БАПВ или АПВ УС (см. 3.3.11, 3.3.13, 3.3.15). При этом устройства ОАПВ и БАПВ следует дополнять устройством АПВ с проверкой синхронизма;
2) при наличии четырех и более связей, а также при наличии трех связей, если в последнем случае одновременное длительное отключение двух из этих связей маловероятно (например, если все линии одноцепные), - АПВ без проверки синхронизма.
3.3.19. Устройства АПВ с проверкой синхронизма следует выполнять на одном конце линии с контролем отсутствия напряжения на линии и с контролем наличия синхронизма, на другом конце - только с контролем наличия синхронизма. Схемы устройства АПВ с проверкой синхронизма линии должны выполняться одинаковыми на обоих концах с учетом возможности изменения очередности включения выключателей линии при АПВ.
Рекомендуется использовать устройство АПВ с проверкой синхронизма для проверки синхронизма соединяемых систем при включении линии персоналом.
3.3.20. Допускается совместное применение нескольких видов трехфазного АПВ на линии, например БАПВ и ТАПВ с проверкой синхронизма. Допускается также использовать различные виды устройств АПВ на разных концах линии, например УТАПВ БК (см. 3.3.13) на одном конце линии и ТАПВ с контролем наличия напряжения и синхронизма на другом.
3.3.21. Допускается сочетание ТАПВ с неселективными быстродействующими защитами для исправления неселективного действия последних. В сетях, состоящих из ряда последовательно включенных линий, при применении для них неселективных быстродействующих защит для исправления их действия рекомендуется применять поочередное АПВ; могут также применяться устройства АПВ с ускорением защиты до АПВ или с кратностью действия (не более трех), возрастающей по направлению к источнику питания.
3.3.22. При применении трехфазного однократного АПВ линий, питающих трансформаторы, со стороны высшего напряжения которых устанавливаются короткозамыкатели и отделители, для отключения отделителя в бестоковую паузу время действия устройства АПВ должно быть отстроено от суммарного времени включения короткозамыкателя и отключения отделителя. При применении трехфазного АПВ двукратного действия (см. 3.3.6) время действия АПВ в первом цикле по указанному условию не должно увеличиваться, если отключение отделителя предусматривается в бестоковую паузу второго цикла АПВ.
Для линий, на которые вместо выключателей устанавливаются отделители, отключение отделителей в случае неуспешного АПВ в первом цикле должно производиться в бестоковую паузу второго цикла АПВ.
3.3.23. Если в результате действия АПВ возможно несинхронное включение синхронных компенсаторов или синхронных электродвигателей и если такое включение для них недопустимо, а также для исключения подпитки от этих машин места повреждения следует предусматривать автоматическое отключение этих синхронных машин при исчезновении питания или переводить их в асинхронный режим отключением АГП с последующим автоматическим включением или ресинхронизацией после восстановления напряжения в результате успешного АПВ.
Для подстанций с синхронными компенсаторами или синхронными электродвигателями должны применяться меры, предотвращающие излишние срабатывания АЧР при действии АПВ.
3.3.24. АПВ шин электростанций и подстанций при наличии специальной защиты шин и выключателей, допускающих АПВ, должно выполняться по одному из двух вариантов:
1) автоматическим опробованием (постановка шин под напряжение выключателем от АПВ одного из питающих элементов);
2) автоматической сборкой схемы; при этом первым от устройства АПВ включается один из питающих элементов (например, линия, трансформатор), при успешном включении этого элемента производится последующее, возможно более полное автоматическое восстановление схемы доаварийного режима путем включения других элементов. АПВ шин по этому варианту рекомендуется применять в первую очередь для подстанций без постоянного дежурства персонала.
При выполнении АПВ шин должны применяться меры, исключающие несинхронное включение (если оно является недопустимым).
Должна обеспечиваться достаточная чувствительность защиты шин на случай неуспешного АПВ.
3.3.25. На двухтрансформаторных понижающих подстанциях при раздельной работе трансформаторов, как правило, должны предусматриваться устройства АПВ шин среднего и низшего напряжений в сочетании с устройствами АВР; при внутренних повреждениях трансформаторов должно действовать АВР, при прочих повреждениях - АПВ (см. 3.3.42).
Допускается для двухтрансформаторной подстанции, в нормальном режиме которой предусматривается параллельная работа трансформаторов на шинах данного напряжения, устанавливать дополнительно к устройству АПВ устройство АВР, предназначенное для режима, когда один из трансформаторов выведен в резерв.
3.3.26. Устройствами АПВ должны быть оборудованы все одиночные понижающие трансформаторы мощностью более 1 MB·А на подстанциях энергосистем, имеющие выключатель и максимальную токовую защиту с питающей стороны, когда отключение трансформатора приводит к обесточению электроустановок потребителей. Допускается в отдельных случаях действие АПВ и при отключении трансформатора защитой от внутренних повреждений.
3.3.27. При неуспешном АПВ включаемого первым выключателем элемента, присоединенного двумя или более выключателями, АПВ остальных выключателей этого элемента, как правило, должно запрещаться.
3.3.28. При наличии на подстанции или электростанции выключателей с электромагнитным приводом, если от устройства АПВ могут быть одновременно включены два или более выключателей, для обеспечения необходимого уровня напряжения аккумуляторной батареи при включении и для снижения сечения кабелей цепей питания электромагнитов включения следует, как правило, выполнять АПВ так, чтобы одновременное включение нескольких выключателей было исключено (например, применением на присоединениях АПВ с различными выдержками времени).
Допускается в отдельных случаях (преимущественно при напряжении 110 кВ и большом числе присоединений, оборудованных АПВ) одновременное включение от АПВ двух выключателей.
3.3.29. Действие устройств АПВ должно фиксироваться указательными реле, встроенными в реле указателями срабатывания, счетчиками числа срабатываний или другими устройствами аналогичного назначения.
[ ПУЭ]Тематики
- высоковольтный аппарат, оборудование...
- релейная защита
- электроснабжение в целом
Обобщающие термины
Синонимы
Сопутствующие термины
- АПВ воздушных линий
- АПВ смешанных (кабельно-воздушных) линий
- двукратное АПВ
- неуспешное АПВ
- однократное АПВ
- трехкратное АПВ
- цикл АПВ
EN
- AR
- ARC
- auto-reclosing
- automatic reclosing
- automatic recluse
- autoreclosing
- autoreclosure
- reclose
- reclosing
- reclosure
DE
- automatische Wiedereinschaltung
- Kurzunterbrechung
- selbsttätiges Wiederschließen (eines mechanischen Schaltgerätes)
- Wiedereinschaltung, automatische
FR
Русско-французский словарь нормативно-технической терминологии > автоматическое повторное включение
-
10 программируемый логический контроллер
- speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-немецкий словарь нормативно-технической терминологии > программируемый логический контроллер
11 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
12 решение
решение
Выбор альтернативы.
[ http://tourlib.net/books_men/meskon_glossary.htm]
решение
(в планировании и управлении, исследовании операций, экономико-математическом моделировании) — 1. Выбор одной или нескольких альтернатив из множества возможных (вариантов Р.). 2. Процесс (алгоритм) осуществления такого выбора. Этот выбор основывается на оценке и сопоставлении ожидаемых результатов принятия тех или иных альтернатив с точки зрения целей (или цели), поставленных в решаемой задаче. Для принятия Р., таким образом, необходимы: четко сформулированная цель; список альтернативных возможностей (стратегий, т.е. вариантов распределения сил и средств и т.д.) и правила выбора между ними, т.е. в общем случае, критерий качества Р.; знание факторов, которые могут повлиять на результат при принятии того или иного Р. В исследовании операций и в целом в экономико-математических методах распространено обоснование Р. не непосредственно (например, путем реального экономического эксперимента), а с помощью экономико-математических моделей. Принято говорить о решении модели, т.е. о выборе такой совокупности значений ее переменных, которая обеспечивает наилучшее по какому-либо критерию значение целевой функции. Как видно, данное выше общее определение относится и к понятию «Р. модели», поскольку оно означает отбор из ряда возможных вариантов (векторов) значений переменных (каждый из них — альтернатива) того варианта, который приводит к лучшему результату. Надо лишь учесть, что поскольку модель не может быть точным отражением действительности, Р. модели не обязательно будет решением реальной задачи; во всяком случае при переходе от модели к действительности нужна дополнительная проверка адекватности Р. Процессы Р. моделей подразделяются на аналитические и численные. Метод аналитического Р. — последовательность математических преобразований, приводящих к заданному результату (например, к формуле, выражающей зависимость экстремального значения функции от ее аргументов). В этом случае численные значения переменных (см. Аналитические методы решения моделей) включаются лишь на последнем этапе. Численные методы получения Р., среди которых наибольшее значение имеют итеративные (см. Численные методы оптимизации), отличаются тем, что в них численные значения переменных участвуют в процессе Р. с самого начала, и на каждом этапе проверяется, соответствуют ли они заданной цели: в случае положительного ответа процесс Р. заканчивается, в случае отрицательного — продолжается. Полученное Р. обычно не является окончательным — изменение условий и целей всегда может поставить вопрос о его корректировке, подстройке. Корректировка (иногда она также называется “управление решением”) — необходимое условие успешного внедрения моделей в практику. Классификация моделей принятия Р. пока не разработана. Есть лишь частичные классификации по отдельным аспектам. Например, а) по степени сложности: простые, принимаемые по одному критерию оценки и выбора альтернатив, и сложные — принимаемые по нескольким критериям; б) по имеющейся информации о возможных результатах: Р., принимаемые в условиях определенности (см. Детерминированные задачи), неопределенности, риска (частичной неопределенности); в) по временному охвату: стратегические и тактические; г) по виду зависимости переменных от времени: статические и динамические; д) по числу лиц, принимающих Р.: индивидуальные и групповые. В последнем случае возникает необходимость согласования индивидуальных Р. (см., например, Теория группового выбора, Согласование плановых решений), различаются также дискретные и непрерывные Р. См. также: Алгоритм управления, Дерево решений, Лицо, принимающее решения, Многошаговые процессы принятия решений, Область допустимых решений, Планово-экономическая задача, Последовательные методы принятия решений, Решение игры, Системы поддержки решений, Теория решений, Экономико-математический анализ решения оптимизационных задач, Экономические решения.
[ http://slovar-lopatnikov.ru/]Тематики
EN
3.9 решение (decision): Результат выбора между различными направлениями действия.
Источник: ГОСТ Р ИСО 19439-2008: Интеграция предприятия. Основа моделирования предприятия оригинал документа
3.130 решение (decision): Результат выбора между различными направлениями действия.
Источник: ГОСТ Р 54136-2010: Системы промышленной автоматизации и интеграция. Руководство по применению стандартов, структура и словарь оригинал документа
Русско-английский словарь нормативно-технической терминологии > решение
13 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-французский словарь нормативно-технической терминологии > программируемый логический контроллер
14 ПРОБЛЕМА ОПРЕДЕЛЕНИЯ В ПСИХОАНАЛИЗЕ
\\ \ \ \ \ Каждая профессиональная область имеет специальный словарь, чтобы описывать и категоризировать свои наблюдения, выдвигать гипотезы о взаимосвязи явлений и концептуализировать возможные объяснения. Эти языки, как правило, развиваются постепенно и несколько бессистемно, путем приращения. Систематизацией можно заниматься только позже, когда накопилось достаточное количество наблюдений и стали очевидными организующие и интегрирующие общности. Между тем некоторые термины приобретают различные значения, тогда как другие группы слов обозначают по существу одно и то же. Поэтому время от времени профессионалы должны обращаться к словарям, которые они используют, и пытаться разобраться в различных значениях терминов, которые они приобрели.\ \ \ \ \ Психоанализ не является исключением в этом процессе; поэтому неудивительно, что в прошлой половине столетия постоянно появлялись новые компиляции психоаналитических терминов. Хотя сам Фрейд не определял систематически термины, он охотно оказывал помощь Рихарду Ф. Штербе, чья подготовка "Настольного словаря психоанализа" (1936—1937), к сожалению, была прервана Второй мировой войной. Эрнест Джонс попытался создать "международный словарь", который был бы избавлен от разного рода идиосинкразических коннотаций (Ornston, 1985b, 1988). Фрейд не вмешивался в выборы Джонса и избегал большинства терминов из его международного словаря, однако собрания Комитета по глоссарию под председательством Джонса во многом повлияли на выборы Джеймса Стрейчи при переводе. С тех пор появилось множество компиляций, каждая с несколько отличной концепцией (Fodor and Gaynor, 1950; English and English, 1958; Moore and Fine, 1967; Laplanche and Pontalis, 1967; Rycroft, 1968; Eidelberg, 1968; Nagera, 1969—1971; Wolman, 1977). Некоторые из этих работ, например "Словарь психоанализа" Лапланша и Понталиса, включают в себя не только определения, но и исторические комментарии, дополненные ссылками и цитатами. Эти последовательные попытки определить психоаналитическую теорию отражают неудовлетворенность существующими подходами, а также потребность в учете развивающейся теории.\ \ \ \ \ Фрейд часто менял свои теоретические выводы на основе последующих наблюдений (например, он отказался от теории совращения, подверг ревизии теории влечений и тревоги и использовал последовательные модели психики). Обычно он не стремился разъяснять новую теорию в сравнении с прежней и уделял мало внимания систематизации теории. Однако некоторые из его непосредственных последователей, в частности Хайнц Гартманн, Эрнст Крис, Рудольф М. Лёвенштейн, Отто Фенихель, Давид Рапапорт, Мертон М. Гилл, Эрик Эриксон и Эдит Якобсон, потратили немало сил на эту "уборочную" работу. Такие проблемы, как место психоанализа в науке (Hook, 1959), формирование психоаналитической теории (Waelder, 1962, Basch, 1973) и модели психики (Abrams, 1971; Gedo и Goldberg, 1973), вызывали постоянный интерес у психоаналитиков.\ \ \ \ \ Главным образом теоретики занимались объяснительной ценностью психоаналитических конструктов и их эпистемологическим соответствием. Мы не можем полностью игнорировать такие вопросы, но они не являются предметом нашего непосредственного интереса. При подготовке глоссариев или компендиумов первоочередной целью является то, что Баш назвал "выражением" (1973, с. 47), а Лангер — "представлением идеи с использованием точных и верных слов" (1962, с. 78). Историческое развитие идеи, даже релевантной, невозможно проследить полностью. Стандартизация терминов необходима для изучения, исследования и развития теории; и невозможно сравнить данные без общей системы координат, общего языка, который коллеги используют сейчас и будут использовать в будущем, чтобы передать специфическое значение с помощью символов, отражающих одни и те же явления. Словари и глоссарии облегчают передачу знания начинающим благодаря конденсации значений понятий, приобретенных в течение долгого времени, интеграции более поздних значений с более ранними и помогают определить нынешний статус специфических терминов и понятий.\ \ \ \ \ Однако было бы несправедливо по отношению к читателю расхваливать ценность таких работ, не указав также на некоторые трудности в определении психоаналитических терминов — трудности, которые, вопреки всем намерениям, могут повлиять на разъяснение значения. Они включают в себя проблему перевода, поскольку Фрейд и многие его ранние последователи писали по-немецки, выбор терминов и определение места, которое следует предоставить каждому из них, чтобы отразить их относительную важность, выбор авторов и рецензентов и модификации устаревшей теории. Наконец, как указывал Куби (1972), имеются ошибки в самом языке, и мы должны стараться избегать неправильного употребления слов, чтобы не допустить закрепления неоднозначных и ошибочных понятий, вводя их в свой обиход.\\ \ \ \ \ Зигмунд Фрейд сделал исходные наблюдения, концептуализировал психические процессы и — намеренно или нет — изобрел терминологию для своей новой глубинной психологии. Несмотря на прогресс в психоанализе, отраженный в современной литературе, по-прежнему важная цель английских лексикологов состоит в том, чтобы наиболее точно определить значения терминов, первоначально выраженных на идиосинкразическом немецком языке. Трудности этой задачи возросли вследствие искажений со стороны различных переводчиков Фрейда, усилиям которых мешали структурные трудности самого перевода и уникальные различия между английским языком и немецким, особенно с точки зрения научной терминологии.\ \ \ \ \ Согласно принципу лингвистической относительности Сапира-Ворфа, структура языка влияет на то, как человек воспринимает действительность и, исходя из этого, себя ведет (Carroll, 1956). Во введении к своему "Критическому словарю психоанализа" Райкрофт отмечал, что "нечто существенное происходит с идеей или теорией, когда она переводится на другой язык" (1968, с. XII). Райкрофт на примерах показывает, что трудности обусловлены не только отдельными словами, но также лингвистической структурой и привычными способами мышления, которые зависят от культуры, эпохи и языка.\ \ \ \ \ Помимо этих структурных различий между языками существуют трудности, обусловленные идиосинкразическим использованием терминов и неумышленной подменой их значения переводчиком. То, что Фрейд получил Премию Гёте по литературе, свидетельствует о его умении удачно использовать слова при изложении своих идей, но его уникальный стиль не мог не получить повреждения на минных полях перевода. Фрейд заимствовал терминологию из психологической, психопатологической и нейрофизиологической науки своего времени и часто обращался к обычным словам. Используя разнообразные лингвистические методы, чтобы передать сложную и не поддающуюся определению работу бессознательных психических процессов, "он, так сказать, создает общее впечатление, знакомый образ или биологическую аналогию, постепенно добавляет новые значения и очищает вопросы от своих первых сравнений... [используя слова], чтобы создать резонанс между некоторыми скорее диффузными чувствами [между пациентом, аналитиком и читателями] и дать место своим поразительным метафорам" (Ornston, 1982, с. 412—415). "Постоянно меняя свой язык, он обогащал и прояснял свои представления о том, что он называл описательными координатами и организующими абстракциями" (с. 410). Концептуальная непоследовательность Фрейда, выраженная в поэтической игре слов — каламбурах, иронии и персонификации механизмов, инстанций и аппаратов, — придавала многозначительность и гибкость его сочинениям, которые позволяли ему высказывать несколько разных вещей одновременно. Таким образом, Фрейд излагал свои концепции, мастерски используя яркий и эмоционально неотразимый язык, вызывающий у читателя ощущение близости проблемы. Он не придерживался точного определения технических терминов.\ \ \ \ \ В обширной литературе на многих языках исследуются собственные источники и стиль Фрейда, а также изменения, внесенные его переводчиками и интерпретаторами. Не затрагивая выводов, которые пока еще являются спорными, я подытожу некоторые из многих признаваемых сегодня проблем.\ \ \ \ \ Исследовательский метод Фрейда постоянно менялся, и он осмысливал бессознательное самыми разными способами, которые позволяют читателю держать в памяти одновременно несколько образов. Стрейчи и другие английские переводчики последовательно заменяли аффективно окрашенные, обиходные немецкие слова, использовавшиеся Фрейдом, абстракциями, производными от слов из греческого или латинского языка, и меняли динамические, активные конструкции Фрейда на статичные и пассивные. Стрейчи игнорировал также описание Фрейдом его собственных идей как способов мышления о бессознательных и психических процессах. Стрейчи свел описания Фрейда к общеупотребительным, изобилующим значениями о пространстве, структуре и силах, генерирующих энергию. Фрейд часто использовал одно и то же слово в разных значениях и прибегал к разным словам для описания близких идей. В попытке систематизации Стрейчи полностью изменил эту тенденцию. Таким образом, переводы Стрейчи выглядят более механистическими и структурированными, чем немецкая проза Фрейда, и являются искусственно научными. Хотя в своем общем предисловии к "Стандартному изданию" Стрейчи указывал на понимание им трудностей перевода, тем не менее он, по-видимому, считал свое собственное прочтение психологии Фрейда единственно верным и полагал, что дал "правильное истолкование понятиям Фрейда" и что его перевод избавлен от его собственных теоретических представлений (Strachey, 1966, с. XIX, Ornston, 1985b, с. 394).\ \ \ \ \ Здесь мы должны учитывать опасность, подстерегающую наши усилия. Мы определяем понятия, которые чаще всего первоначально были задуманы Фрейдом на немецком, потом профильтрованы через Стрейчи, а затем были изменены работой нескольких поколений ученых, говоривших на разных языках. Понятия видоизменились, они больше не являются первоначальными идеями Фрейда. Мы также должны иметь в виду то, что определения являются сконденсированными интерпретациями многих людей, аналогичными последующим переводам. В результате ошибки сделанного Стрейчи перевода Фрейда могли усугубиться, но тем не менее они отражают нынешний статус психоанализа. Со времен Аристотеля считается, что определение должно выражать сущность понятия. Интерпретация и конденсация упрощают термины, помогая тем самым пониманию. Однако упрощение может также устанавливать терминам слишком узкие или слишком свободные рамки. Поэтому, хотя несущественное и должно быть устранено, определениям психоаналитических понятий часто идет на пользу некоторое дополнительное пояснение. В этой книге мы попытались найти оптимальный баланс; это означает, что многие наши определения по своему объему выходят за рамки глоссария и являются небольшими статьями.\ \ \ \ \ Выражая идеи Фрейда и других психоаналитиков, мы должны иметь в виду, что, как подчеркивает Шефер, "давать определение — это значит также создавать и навязывать... В той степени, в какой мы связываем между собой или приравниваем такие названия, как, например, женственность и пассивность, мы оказываем глубокое и стойкое формирующее воздействие на то, что будет считаться женским или пассивным" (Schafer, 1974, с. 478). Процесс отбора терминов и понятий и определение того, сколько места отвести каждому из них, сопряжены с подобным риском увековечения ошибок теоретизирования. Например, посвящение большой статьи относительно маловажной теме придает ей чрезмерное значение. Кроме того, наши "авторитетные" переформулировки теорий Фрейда могут отразиться на обучении, если в них будут доказываться устаревшие представления. Таким образом, хотя и можно согласиться с тем, что исторические императивы требуют представления идей Фрейда в их первоначальной форме, точно так же необходима некоторая коррекция устарелой теории, если мы хотим избежать неверного восприятия нынешнего статуса психоанализа. Определения и комментарии в "Словаре психоанализа" Лапланша и Понталиса (1973), например, являются неоценимыми для ученых в том, что они точно указывают психоаналитическую гавань, из которой отправились на корабле различные международные движения; к сожалению, некоторые из концептуальных судов построены по моделям времен Первой мировой войны и могут затонуть при серьезном испытании.\ \ \ \ \ Но кто должен решать, что отобрать и что исправить? Жан Бергере (1985) призвал к учреждению Психоаналитического научного совета, открытого для ученых всех стран, чтобы создать хотя бы минимум условий, необходимых для научных дебатов. Однако все прежние попытки добиться международного консенсуса в определениях не обнадеживают. Вместо этого мы решили по возможности выбрать одного или нескольких авторов, которые изучали предмет или продемонстрировали образцовую ясность в понимании или разъяснении. Многие из работ этих авторов, неизбежно включавшие в себя разные переводы и интерпретации со всеми ограничениями, о которых только что говорилось, отсылались другим ученым для оценки, синтеза, пересмотра и переработки.\ \ \ \ \ Общая терминология могла бы принести пользу психоанализу. Вместо этого мы обнаруживаем "все большее психоаналитическое разнообразие... плюрализм теоретических подходов, лингвистических и мыслительных конвенций, различных региональных, культурных и языковых акцентов" (Wallerstein, 1988, с. 5). Расходящиеся группы объединяются приверженностью основным концепциям Фрейда — признанием бессознательного, вытеснения, сопротивления и переноса. Чтобы извлечь все выгоды из того общего, что было выработано нами в процессе развития психоанализа, мы должны лучше понимать основные теории друг друга. Поэтому мы включили в это издание термины, возникшие в школах, которые не являются строго фрейдистскими, и выбранные на основе их относительной распространенности в мире психоаналитической литературы. В каждом случае термины были рассмотрены людьми, хорошо знакомыми с литературой данной школы.\ \ \ \ \ Вскоре после появления первого издания этой работы Куби заметил, что глоссарии имеют тенденцию давать определения, в которых смешиваются "количественные метафоры с количественными мерами, описание с объяснением, метафоры с гипотезами [и] адъективное значение слова с его номинативными значениями". Он подверг критике "ошибку рассмотрения части как целого, post hoc ошибку смешения причины и следствия и телеологическую ошибку смешения следствия с целью" (1972). Учитывая универсальность этих явлений и эффективное использование Фрейдом метафор в изложении своих идей, утверждение Куби ведет нас к рассмотрению того, в какой мере представление теории может оказаться искажено такими тенденциями, включающими в себя не только науку, но и основные принципы самого языка. Согласно Рапопорту, "процесс передачи накопленных знаний, который Коржибский называл связью времен, совершается при помощи символов" (Rapoport, 1955, с. 63). До недавнего времени, пока шимпанзе не лишили нас лелеемой иллюзии, считалось, что использование символов является важнейшей и уникальной характеристикой человеческой расы. В отличие от сигнала, который есть не что иное, как стимул, ответ на который является обусловленным, символ вызывает ответ только по отношению к другим символам. В разных контекстах один и тот же символ может вызывать различные реакции; его нельзя определить вне контекста. Объединяясь в определенные последовательности, символы образуют язык, "символическую вселенную", которая помогает людям воспринимать, понимать, сообщать и формировать свой внешний мир, который, в свою очередь, формируется под влиянием этого внешнего мира.\ \ \ \ \ Термины, понятия, гипотезы, теории и законы, которые являются основными инструментами теоретического здания в любой науке, суть просто символы, управляемые в соответствии с правилами грамматики и логики. Будет ли определение наполнено смыслом — вопрос семантический, обусловленный отношениями между терминами и явлениями, к которым они относятся, и не имеющий отношения к грамматике или логике. Термины определяются операционально в соответствии с наблюдаемыми воздействиями, достаточно постоянными, чтобы каждый раз, когда возникает эффект, применение термина было оправданным. Определения — это компромиссные соглашения, которые никогда нельзя путать с фактами.\ \ \ \ \ Куби (1975) выступал за использование прилагательных вместо существительных при описании психических явлений; существительные, по его мнению, ведут к антропоморфическому мышлению и к материализации абстракций. Он предпочитал говорить о "бессознательном процессе", а не о "бессознательном". Шефер (1976) считает, что все психические феномены, такие, как действия, должны описываться глаголами и наречиями. Подобные попытки при разъяснении не предотвращают путаницы с буквальным пониманием; они также могут вести к появлению других проблем. При обсуждении абстрактных понятий мы используем слова и выражения в значении, отличающемся от того, которое принадлежит им в других случаях. Метафора, сравнение, метонимия, синекдоха и ирония используются, чтобы придать жизнь, стиль или акцент идее. Когда сравнение или метафора охватывает суть идеи, оно проявляется в определениях. В своих работах Рубинштейн (1972) и Вурмсер (1977) отстаивают использование метафоры при объяснении теории.\ \ \ \ \ Метафоры, которые зависят от абстрагирования сходных признаков от несходных в остальном объектов и событий, всегда являются неоднозначными в самом конкретном смысле, будь то синонимы или нет. Однако метафорически преобразованное слово обычно устанавливает свое собственное буквальное значение, а также придает двойное значение с минимумом выражения, абстрагирует и классифицирует благодаря конденсации. Таким образом, слова приобретают новые значения, которых до этого они вроде бы не имели. Тем самым метафоры могут компенсировать недостаточность языка и помогать его развитию. Заставляя человека искать сходства, они могут обнаруживать свойства с большей проницательностью. Простая метафора способна передать значение, которое скрывается за тем или иным сочетанием слов, увеличивая таким образом ресурсы нашего языка. Она может также указать на смысл, отчасти создавая и отчасти раскрывая внутреннее значение. Следовательно, она может передавать индивидуальность эмоции, чего нельзя сделать с помощью буквального языка.\ \ \ \ \ Куби (1975) утверждает, что метафоры никогда не бывают более чем приближением; в лучшем случае они представляют собой лишь аналогии, которые являются частично истинными и частично ложными. Метафоры зависят от проекций внутреннего субъективного опыта. Кроме того, он считает, что все они слишком часто неверно употребляются и ведут к ошибкам при распознавании различий между метафорой и теорией. Хотя метафора может служить целям приблизительного описания, даже такое описание часто вводит в заблуждение, поскольку может приниматься как объяснение. Другие теоретики указывают, что мы не можем абстрактно мыслить, не имея метафорических моделей. Вурмсер (1977) приводит доводы в пользу употребления метафоры при изложении теории, а Валлерштейн (1988) заключает, что любая теория есть метафора.\ \ \ \ \ Язык может препятствовать правильному пониманию, но мы должны пользоваться тем, что доступно. Аналитический язык был бы поистине скучным, если бы ограничивался адъективными обозначениями, за что ратует Куби, или глаголами, как предлагает Шефер, или сравнениями. Хотя метафора может быть преобразована в сравнение, если ввести слова "как" или "подобно", ее когнитивное и эмоциональное воздействие тем самым уменьшится. И если современные компьютерные модели могут более точно представить функционирование мозга, старые мышечные или гидравлические аналогии и мифологические параболы звучат правдивее в терминах переживаний и эмоций. Они связываются в символических образах с феноменами первичного процесса, и их использование способно помочь в интеграции психических процессов. Они являются существенными аспектами в человеческой коммуникации, важными факторами в привлечении внимания и облегчении понимания. И хотя мы должны стараться избегать лингвистических ловушек в психоаналитических рассуждениях, "весьма сомнительно, что пересмотр терминологии уменьшит наши проблемы, а настойчивые требования отказаться от словарей, чтобы решить научные или социальные вопросы, могут выполнять ту же функцию, какую выполняет фонарный столб для алкоголика: скорее опоры, чем средства освещения" (Begelman, 1971, с. 47). Вместо того чтобы отстаивать редукционизм, мы должны культивировать семантическое сознание, помогающее увидеть различие между символом и тем, к чему он относится, между выводом и наблюдением, между правомерным заключением и утверждением факта; короче говоря, мы должны осознавать искажения, которые неизбежно привносит вербализация в наше восприятие. Такое осознание особенно необходимо в области научного исследования, передачи его результатов, превращения этих результатов в теорию и сообщения теории другим людям.\Барнесс Э. Мур\Лит.: [13, 58, 64, 146, 177, 186, 217, 347, 405, 435, 533, 534, 537, 540, 541, 625, 631, 647—650, 711, 740, 742, 758, 760, 811, 834, 852, 864, 901, 903]О словаре: _about - Psychoanalytic Terms and ConceptsСловарь психоаналитических терминов и понятий > ПРОБЛЕМА ОПРЕДЕЛЕНИЯ В ПСИХОАНАЛИЗЕ
15 система электроснабжения
- supply system
- SS
- power-supply system
- power supply system
- Elektrischen Versorgung das System
- electricity supply system
система электроснабжения
Совокупность взаимосвязанных энергоустановок, осуществляющих электроснабжение района, города, предприятия.
[ ГОСТ 19431-84]
система электроснабжения
Совокупность электроустановок, предназначенная для обеспечения потребителей электрической энергией.
[ОСТ 45.55-99]2.14. В проектной практике имеет место деление системы электроснабжения энергоемкого промышленного предприятия на внешнее электроснабжение (электрические сети энергосистемы до приемных пунктов электроэнергии на предприятии) и внутреннее электроснабжение (от приемных пунктов до потребителя предприятия)....
2.15. Система электроснабжения промышленного предприятия должна учитывать очередность его сооружения. Сооружение последующих очередей строительства не должно приводить к нарушению или снижению надежности электроснабжения действующих производств.
Система электроснабжения должна обеспечивать возможность роста потребления электроэнергии предприятием без коренной реконструкции системы электроснабжения.2.17. При проектировании системы электроснабжения промышленного предприятия следует учитывать потребность в электроэнергии сторонних близлежащих потребителей во избежание нерациональных затрат на их локальное электроснабжение.
3.5. Надежность электроснабжения промышленного предприятия со сложным непрерывным технологическим процессом (НТП), требующим длительного времени на восстановление рабочего режима при нарушении системы электроснабжения, определяется помимо требуемой степени резервирования длительностью перерыва питания при нарушениях в системе электроснабжения и ее сопоставлением с предельно допустимым временем перерыва электроснабжения, при котором возможно сохранение НТП данного производства.4.4.3. Мощности независимых источников питания в послеаварийном режиме определяются исходя из требуемой степени резервирования системы электроснабжения предприятия.
6.1.2. Системы электроснабжения с двумя приемными пунктами электроэнергии следует применять:
- при повышенных требованиях к надежности питания электроприемников I категории;
- при двух обособленных группах потребителей на площадке предприятия;
- при поэтапном развитии предприятия в тех случаях, когда для питания нагрузок второй очереди целесообразно сооружение отдельного приемного пункта электроэнергии;
- во всех случаях, когда применение двух приемных пунктов экономически целесообразно.
В указанных случаях приемные пункты должны быть территориально разобщены и размещаться, как правило, по разные стороны предприятия.
Должна быть исключена возможность одновременного попадания приемных пунктов в факел загрязнения.
6.1.3. При построении системы электроснабжения предприятия во всех случаях, где это возможно, следует применять схемы глубоких вводов 110-330 кВ как наиболее экономичной и надежной системы распределения электроэнергии.6.2.6. При построении системы электроснабжения на напряжении 35 кВ для...
8.7. При проектировании системы электроснабжения промышленного предприятия, имеющего в своем составе электроприемники, чувствительные к изменениям показателей качества электроэнергии, следует...
9.8.1. Регулирование напряжение в системах электроснабжения промышленных предприятий, в основном, должно обеспечиваться применением трансформаторов и автотрансформаторов с автоматическим регулированием напряжения под нагрузкой и выбором оптимальных ответвлений у нерегулируемых под нагрузкой трансформаторов.
10.4. Выбор компенсирующих устройств должен производиться одновременно с выбором других основных элементов системы электроснабжения предприятия с учетом динамики роста электрических нагрузок и поэтапного развития системы.
[НТП ЭПП-94]
1.11 Система электроснабжения должна обеспечивать в условиях послеаварийного режима путем соответствующих переключений питание электроэнергией тех электроприемников, работа которых необходима для продолжения производства.
1.12. При определении объема резервирования и пропускной способности системы электроснабжения не следует учитывать возможность совпадения планового ремонта элементов электрооборудования и аварии в системе электроснабжения, за исключением случаев питания электроприемников особой группы.
При проектировании системы электроснабжения необходимо определять допустимое снижение нагрузки на время послеаварийного режима и планово-предупредительного ремонта.
2.2. Основными источниками питания должны служить электростанции и сети районных энергосистем. Исключение представляют большие предприятия с большим теплопотреблением, где основным источником питания может быть собственная электростанция (ТЭЦ). Но и в этом случае обязательно должна предусматриваться связь системы электроснабжения предприятия с сетью энергосистемы.
5.1. Напряжение каждого звена системы электроснабжения должно выбираться с учетом напряжений смежных звеньев.
[СН 174-75]
Тематики
Действия
- нарушение системы электроснабжения
- проектирование системы электроснабжения
- регулирование напряжения в системе электроснабжения
- резервирование системы электроснабжения
Сопутствующие термины
- внешнее электроснабжение
- внутреннее электроснабжение
- основные элементы системы электроснабжения
- пропускная способность системы электроснабжения
- система электроснабжения промышленного предприятия
- система электроснабжения сдвумя приемными пунктами электроэнергии
- степень резервирования системы электроснабжения
EN
Русско-английский словарь нормативно-технической терминологии > система электроснабжения
16 зарядное устройство (в электротехнике)
устройство зарядное (в электротехнике)
Устройство для зарядки электрических аккумуляторов и батарей конденсаторов.
[РД 01.120.00-КТН-228-06]
Зарядные устройства аккумуляторовЕмкость и время работы аккумуляторных батарей очень сильно зависят от типа и качества зарядных устройств, применяемых для их заряда, которые обеспечивают определенный метод заряда и выбор режима разряда. Выбор хорошего зарядного устройства для пользователя аккумуляторов часто является вопросом второстепенной важности, особенно при использовании аккумуляторов в бытовой электронной технике. Однако это очень существенный вопрос, и решать его нужно сразу, чтобы впоследствии не удивляться, почему так быстро приходится менять аккумуляторы или почему они не держат заряд. В большинстве случаев деньги, вложенные в покупку хорошего зарядного устройства, оправдывают себя в результате эффективной работы и длительного срока службы аккумуляторов.
Построение схемы простейшего зарядного устройства зависит от принципов заряда, которых, в общем, два: ограничение тока заряда и ограничение напряжения заряда. Принцип заряда с ограничением тока заряда используется при заряде никель-кадмиевых и никель-металлгидридных аккумуляторов, а принцип с ограничением напряжения заряда - при заряде свинцово-кислотных, литий-ионных и литий-полимерных аккумуляторов.
Весьма быстрое развитие электроники, совершенствование её элементной базы привели к созданию специализированных микросхем зарядных устройств, способные автоматически обеспечить заряд аккумулятора по заданному алгоритму и предназначенные для заряда аккумуляторов любого типа. Кроме того, отдельные типы микросхем помимо заряда обеспечивают измерение емкости аккумулятора или аккумуляторной батареи и степени разряда.
Современные микросхемы зарядных устройств способны очень четкое прекращать процесса заряда практически по всем возможным характеристикам заряда: по скорости повышения температуры ΔТ/Δt, по пиковому напряжению на аккумуляторной батарее, по кратковременному понижению напряжения ΔU/Δt, по максимальной температуре, по сигналу таймера. Отдельные микросхемы обеспечивают контроль температуры окружающей среды и в зависимости от этого корректируют режим заряда и разряда. Например, такая коррекция происходит пошагово при изменении температуры на каждые 10 °С в пределах от -35 до +85 °С. На практике любая из этих схем, взятая за основу, обрастает дополнительными элементами, добавляющими зарядному устройству новые возможности, улучшая его характеристики.
Зарядные устройства аккумуляторов, обеспечивающие постоянный ток ( гальваностатический режим заряда)
Большая часть зарядных устройств обеспечивает заряд только постоянным током и потому пригодны лишь для заряда щелочных герметичных аккумуляторов (никель-металлгидридных и никель-кадмиевых). Простейшие бытовые зарядные устройства, осуществляющие заряд постоянным током, применяются для заряда от 1 до 4 аккумуляторов. Они различаются в основном конструкцией, а не принципиальной электрической схемой. Чаще всего такие зарядные устройства питаются через трансформатор от сети 220В и обеспечивают выпрямленный ток с невысоким уровнем его стабилизации. Ток практически всегда не регулируется, а время заряда определяется самим пользователем.
Универсальность бытовых зарядных устройств, как правило, означает возможность установки в них аккумуляторов разных габаритов и обеспечение постоянного тока порядка 0,1С, по отношению к емкости, которую производитель зарядного устройства считает типичной для аккумуляторов такого типоразмера. Поэтому следует быть внимательным при установке в них аккумуляторов и правильно определять время заряда. За последние 5-7 лет быстрый прогресс промышленности привел к выпуску щелочных аккумуляторов одинаковых габаритов, но отличающихся по емкости в 3 раза. Стремление использовать простые универсальные зарядные устройства для заряда аккумуляторов все большей емкости может привести к очень продолжительному и, главное, малоэффективному заряду токами существенно меньше стандартного значения. Главным достоинством таких зарядных устройств является их низкая цена.
Более дорогие зарядные устройства обеспечивают несколько режимов: доразряд (если он необходим), заряд и режим подзаряда. Доразряд щелочных аккумуляторов (до 1 В/ак) производится с целью снятия остаточной емкости. Однако следует учитывать, что в таких зарядных устройствах аккумуляторы, устанавливаемые в пружинные контакты, могут быть соединены последовательно, а контроль разряда выполняется по предельному разрядному напряжению U=(n х 1,0)В, где n - количество аккумуляторов в цепочке. Но после длительной эксплуатации аккумуляторы могут очень сильно различаться по емкости, и контроль по среднему напряжению для всей цепочки может привести к переразряду или переполюсованию наиболее слабых и их порче.
Прекращение заряда или переключение в режим подзаряда (малым током для компенсации саморазряда) производится в таких зарядных устройствах автоматически в соответствии с некоторыми из тех параметров контроля, которые описаны в другой статье. При использовании таких зарядных устройств следует помнить, что не рекомендуется часто и надолго оставлять аккумуляторы в режиме компенсационного подзаряда, так как это укорачивает срок их службы.
Некоторые зарядные устройства конструктивно оформлены так, что обеспечивают заряд как 1-4 отдельных аккумуляторов, так и 9 В батареи типоразмера 6E22 (E-BLOCK). Некоторые зарядные устройства имеют индивидуальный контроль процесса заряда (детекция -ΔU) в каждом канале, что дает возможность заряжать одновременно аккумуляторы разных типоразмеров.
Следует заметить, что в том случае, когда пользователь может позволить себе длительный заряд никель-кадмиевых или никель-металлгидридных аккумуляторов стандартным током 0,1 С в течение 16 ч, можно использовать простейшие зарядные устройства с контролем процесса по времени. При этом, если нет уверенности в полном исчерпании емкости, следует очередной заряд сократить по времени: лучше некоторый недозаряд аккумуляторов, чем значительный перезаряд, который может привести к их деградации и преждевременном выходе из строя. Но вообще большая часть современных цилиндрических аккумуляторов может перенести случайный довольно значительный перезаряд без повреждения и последствий, хотя емкость их при последующем разряде и не повысится.
Если же нужно максимально сократить время переподготовки аккумуляторов после исчерпания емкости, следует использовать зарядные устройства для быстрого заряда, но с высоким уровнем контроля процесса. При выборе зарядного устройства с разными параметрами контроля процесса следует учитывать, что контроль его по абсолютной величине конечного напряжения ненадежен, а из двух наиболее часто рекомендуемых производителями аккумуляторов параметров (-ΔU и ΔT/Δt) первый реализован уже во многих современных зарядных устройствах, второй - для обычных зарядных устройств редок, прежде всего из-за того, что требует наличия термодатчика, а его устанавливают только в батареях, но возможна установка термодатчика в место контакта аккумулятора с зарядным устройством. Не следует увлекаться и чересчур быстрым зарядом аккумуляторов (некоторые компании предлагают заряд за 15-30 мин). При плохом аппаратурном обеспечении даже надежного способа контроля заряда, столь быстрый заряд значительно сократит срок службы аккумулятора.
Зарядные устройства аккумуляторов, обеспечивающие режим постоянного напряжения ( потенциостатический режим заряда) и комбинированный заряд
Зарядные устройства для свинцово-кислотных, литий-ионных и литий-полимерных аккумуляторных батарей должны осуществлять стабилизацию тока на первой стадии заряда и стабилизацию напряжения питания на второй. Кроме того, должен быть обеспечен контроль конца заряда, который в общем случае может выполняться либо по времени, либо по снижению тока до заданной минимальной величины.
Зарядных устройств с такой стратегией заряда на рынке много меньше, чем зарядных устройств, реализующих режим постоянного тока (имеются ввиду зарядные устройства для непосредственного заряда аккумуляторов и батарей, а не блоки питания для сотовых телефонов, ноутбуков и т.п.).
О зарядных устройствах никель-кадмиевых и никель-металлгидридных аккумуляторах
Для никель-кадмиевых и никель-металлгидридных аккумуляторных батарей существует три типа зарядных устройств. К ним относятся:
1. Зарядные устройства нормального (медленного) заряда
2. Зарядные устройства быстрого заряда
3. Зарядные устройства скоростного заряда
1. Зарядные устройства нормального (медленного) заряда.
Зарядные устройства этого типа, иногда называют ночными. Ток нормального заряда составляет 0,1С. Время заряда - 14...16 ч. При таком малом токе заряда трудно определить время окончания заряда. Поэтому обычно индикатор готовности батареи в зарядных устройствах для нормального заряда отсутствует. Они самые дешевые и предназначены только для зарядки никель-кадмиевых аккумуляторов. Для зарядки как никель-кадмиевых так и никель-металлгидридных аккумуляторов используются другие, более совершенные зарядные устройства. Если зарядный ток установлен правильно, полностью заряженная батарея становится чуть теплой на ощупь. В таком случае нет надобности немедленно отключать ее от зарядного устройства. В нем она может оставаться более чем на один день. Но все же ее отсоединение сразу после окончания заряда - лучший вариант. При применении таких зарядных устройствах проблемы возникают, если они используются для зарядки батарей малой емкости, в то время как рассчитаны для работы с более мощными батареями. В таком случае аккумуляторная батарея станет нагреваться уже по достижении 70% своей емкости. Поскольку возможность понизить ток заряда или прекратить его процесс вообще отсутствует, то во второй половине цикла заряда начнется процесс теплового разрушения аккумуляторов. Единственно возможный способ сохранить аккумуляторы, это отключить их, как только они станут горячими. В случае, если для зарядки мощной аккумуляторной батареи используется недостаточно мощное зарядное устройство, батарея в процессе заряда будет оставаться холодной и никогда не будет заряжена до конца. Тогда она потеряет часть своей емкости.
2. Зарядные устройства быстрого заряда.
Они позиционируются как зарядные устройства среднего класса как по скорости заряда, так и по цене. Заряд аккумуляторов в них происходит в течение 3...6 часов током около 0,ЗС. В качестве необходимого элемента эти зарядные устройства имеют схему контроля достижения аккумуляторами определенного напряжения в конце заряда и их отключения в этот момент. Такие зарядные устройства обеспечивают лучшее по сравнению с устройствами медленного заряда обслуживание аккумуляторов. В настоящее время они уступили свое место зарядным устройствам скоростного заряда.
3. Зарядные устройства скоростного заряда.
Такие зарядные устройства имеют несколько преимуществ перед зарядными устройствами других типов. Главное из них - меньшее время заряда. Хотя из-за большей мощности источника напряжения и необходимости использования специальных узлов контроля и управления такие зарядные устройства имеют наиболее высокие цены. Время заряда в зарядных устройствах такого типа зависит от тока заряда, степени разряда аккумуляторов, их емкости и типа. При токе заряда 1С разряженная никель-кадмиевая батарея заряжается в среднем менее чем за один час. Если же аккумуляторная батарея полностью заряжена, некоторые зарядные устройства переходят в режим подзарядки пониженным током заряда и с отключением по сигналу таймера.
Современные устройства скоростного заряда обычно используются для зарядки как никель-кадмиевых, так и никель-металлгидридных аккумуляторных батарей. Поскольку этот процесс происходит при повышенном токе заряда и за ним необходим контроль, крайне важно, чтобы в конкретном зарядном устройстве заряжались только те аккумуляторы, которые рекомендованы для скоростного заряда производителем. Некоторые батареи маркируют электрически на заводах-изготовителях с той целью, чтобы зарядное устройство могло распознать их тип и основные электрические характеристики. После этого зарядное устройство автоматически установит величину тока и задаст алгоритм процесса заряда, соответствующие установленным в него аккумуляторам.
Еще раз подчеркнем, что свинцово-кислотные и литий-ионные аккумуляторные батареи имеют алгоритмы заряда, не совместимые с алгоритмом заряда никель-кадмиевых и никель-металлгидридных аккумуляторов.
[ http://www.powerinfo.ru/charge.php]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > зарядное устройство (в электротехнике)
17 промышленная сеть верхнего уровня
промышленная сеть верхнего уровня
коммуникационная сеть верхнего уровня
сеть операторского уровня
Сеть верхнего уровня АСУ ТП.
Сеть передачи данных между операторскими станциями, контроллерами и серверами.
[ http://kazanets.narod.ru/NT_PART2.htm]В данной статье речь пойдет о коммуникационных сетях верхнего уровня, входящих в состав АСУ ТП. Их еще называют сетями операторского уровня, ссылаясь на трехуровневую модель распределенных систем управления.
Сети верхнего уровня служат для передачи данных между контроллерами, серверами и операторскими рабочими станциями. Иногда в состав таких сетей входят дополнительные узлы: центральный сервер архива, сервер промышленных приложений, инженерная станция и т.д. Но это уже опции.
Какие сети используются на верхнем уровне?
В отличие от стандартов полевых шин, здесь особого разнообразия нет. Фактически, большинство сетей верхнего уровня, применяемых в современных АСУ ТП, базируется на стандарте Ethernet (IEEE 802.3) или на его более быстрых вариантах Fast Ethernet и Gigabit Ethernet. При этом, как правило, используется полный стек коммуникационных протоколов TCP/IP. В этом плане сети операторского уровня очень похожи на обычные ЛВС, применяемые в офисных приложениях. Широкое промышленное применение сетей Ethernet обусловлено следующими очевидными моментами:
1. Промышленные сети верхнего уровня объединяют множество операторских станций и серверов, которые в большинстве случаев представляют собой персональные компьютеры. Стандарт Ethernet отлично подходит для организации подобных ЛВС; для этого необходимо снабдить каждый компьютер лишь сетевым адаптером (NIC, network interface card). Коммуникационные модули Ethernet для промышленных контроллеров просты в изготовлении и легки в конфигурировании. Стоит отметить, что многие современные контроллеры уже имеют встроенные интерфейсы для подключения к сетям Ethernet.
2. На рынке существует большой выбор недорого коммуникационного оборудования для сетей Ethernet, в том числе специально адаптированного для промышленного применения.
3. Сети Ethernet обладают большой скоростью передачи данных. Например, стандарт Gigabit Ethernet позволяет передавать данные со скоростью до 1 Gb в секунду при использовании витой пары категории 5. Как будет понятно дальше, большая пропускная способность сети становится чрезвычайно важным моментом для промышленных приложений.
4. Очень частым требованием является возможность состыковки сети АСУ ТП с локальной сетью завода (или предприятия). Как правило, существующая ЛВС завода базируется на стандарте Ethernet. Использование единого сетевого стандарта позволяет упростить интеграцию АСУ ТП в общую сеть предприятия, что становится особенно ощутимым при реализации и развертывании систем верхнего уровня типа MES (Мanufacturing Еxecution System).
Однако у промышленных сетей верхнего уровня есть своя специфика, обусловленная условиями промышленного применения. Типичными требованиями, предъявляемыми к таким сетям, являются:
1. Большая пропускная способность и скорость передачи данных. Объем трафика напрямую зависит от многих факторов: количества архивируемых и визуализируемых технологических параметров, количества серверов и операторских станций, используемых прикладных приложений и т.д.
В отличие от полевых сетей жесткого требования детерминированности здесь нет: строго говоря, неважно, сколько времени займет передача сообщения от одного узла к другому – 100 мс или 700 мс (естественно, это не важно, пока находится в разумных пределах). Главное, чтобы сеть в целом могла справляться с общим объемом трафика за определенное время. Наиболее интенсивный трафик идет по участкам сети, соединяющим серверы и операторские станции (клиенты). Это связано с тем, что на операторской станции технологическая информация обновляется в среднем раз в секунду, причем передаваемых технологических параметров может быть несколько тысяч. Но и тут нет жестких временных ограничений: оператор не заметит, если информация будет обновляться, скажем, каждые полторы секунды вместо положенной одной. В то же время если контроллер (с циклом сканирования в 100 мс) столкнется с 500-милисекундной задержкой поступления новых данных от датчика, это может привести к некорректной отработке алгоритмов управления.
2. Отказоустойчивость. Достигается, как правило, путем резервирования коммуникационного оборудования и линий связи по схеме 2*N так, что в случае выхода из строя коммутатора или обрыва канала, система управления способна в кратчайшие сроки (не более 1-3 с) локализовать место отказа, выполнить автоматическую перестройку топологии и перенаправить трафик на резервные маршруты. Далее мы более подробно остановимся на схемах обеспечения резервирования.
3. Соответствие сетевого оборудования промышленным условиям эксплуатации. Под этим подразумеваются такие немаловажные технические меры, как: защита сетевого оборудования от пыли и влаги; расширенный температурный диапазон эксплуатации; увеличенный цикл жизни; возможность удобного монтажа на DIN-рейку; низковольтное питание с возможностью резервирования; прочные и износостойкие разъемы и коннекторы. По функционалу промышленное сетевое оборудование практически не отличается от офисных аналогов, однако, ввиду специального исполнения, стоит несколько дороже.
Рис. 1. Промышленные коммутаторы SCALANCE X200 производства Siemens (слева) и LM8TX от Phoenix Contact (справа): монтаж на DIN-рейку; питание от 24 VDC (у SCALANCE X200 возможность резервирования питания); поддержка резервированных сетевых топологий.Говоря о промышленных сетях, построенных на базе технологии Ethernet, часто используют термин Industrial Ethernet, намекая тем самым на их промышленное предназначение. Сейчас ведутся обширные дискуссии о выделении Industrial Ethernet в отдельный промышленный стандарт, однако на данный момент Industrial Ethernet – это лишь перечень технических рекомендации по организации сетей в производственных условиях, и является, строго говоря, неформализованным дополнением к спецификации физического уровня стандарта Ethernet.
Есть и другая точка зрения на то, что такое Industrial Ethernet. Дело в том, что в последнее время разработано множество коммуникационных протоколов, базирующихся на стандарте Ethernet и оптимизированных для передачи критичных ко времени данных. Такие протоколы условно называют протоколами реального времени, имея в виду, что с их помощью можно организовать обмен данными между распределенными приложениями, которые критичны ко времени выполнения и требуют четкой временной синхронизации. Конечная цель – добиться относительной детерминированности при передаче данных. В качестве примера Industrial Ethernet можно привести:
1. Profinet;
2. EtherCAT;
3. Ethernet Powerlink;
4. Ether/IP.
Эти протоколы в различной степени модифицируют стандартный стек TCP/IP, добавляя в него новые алгоритмы сетевого обмена, диагностические функции, методы самокорректировки и функции синхронизации, оставляя при этом канальный и физический уровни Ethernet неизменными. Это позволяет использовать новые протоколы передачи данных в существующих сетях Ethernet с использованием стандартного коммуникационного оборудования.
Теперь рассмотрим конкретные конфигурации сетей операторского уровня.
На рисунке 2 показана самая простая – базовая конфигурация. Отказ любого коммутатора или обрыв канала связи ( link) ведет к нарушению целостности всей системы. Единичная точка отказа изображена на рисунке красным крестиком.
Рис. 2. Нерезервированная конфигурация сети верхнего уровняТакая простая конфигурация подходит лишь для систем управления, внедряемых на некритичных участках производства (водоподготовка для каких-нибудь водяных контуров или, например, приемка молока на молочном заводе). Для более ответственных технологических участков такое решение явно неудовлетворительно.
На рисунке 3 показана отказоустойчивая конфигурация с полным резервированием. Каждый канал связи и сетевой компонент резервируется. Обратите внимание, сколько отказов переносит система прежде, чем теряется коммуникация с одной рабочей станцией оператора. Но даже это не выводит систему из строя, так как остается в действии вторая, страхующая рабочая станция.
Рис. 3. Полностью резервированная конфигурация сети верхнего уровняРезервирование неизбежно ведет к возникновению петлевидных участков сети – замкнутых маршрутов. Стандарт Ethernet, строго говоря, не допускает петлевидных топологий, так как это может привести к зацикливанию пакетов особенно при широковещательной рассылке. Но и из этой ситуации есть выход. Современные коммутаторы, как правило, поддерживают дополнительный прокол Spanning Tree Protocol (STP, IEEE 802.1d), который позволяет создавать петлевидные маршруты в сетях Ethernet. Постоянно анализируя конфигурацию сети, STP автоматически выстраивает древовидную топологию, переводя избыточные коммуникационные линии в резерв. В случае нарушения целостности построенной таким образом сети (обрыв связи, например), STP в считанные секунды включает в работу необходимые резервные линии, восстанавливая древовидную структуры сети. Примечательно то, что этот протокол не требует первичной настройки и работает автоматически. Есть и более мощная разновидность данного протокола Rapid Spanning Tree Protocol (RSTP, IEEE 802.1w), позволяющая снизить время перестройки сети вплоть до нескольких миллисекунд. Протоколы STP и RSTP позволяют создавать произвольное количество избыточных линий связи и являются обязательным функционалом для промышленных коммутаторов, применяемых в резервированных сетях.
На рисунке 4 изображена резервированная конфигурация сети верхнего уровня, содержащая оптоволоконное кольцо для организации связи между контроллерами и серверами. Иногда это кольцо дублируется, что придает системе дополнительную отказоустойчивость.
Рис. 4. Резервированная конфигурация сети на основе оптоволоконного кольцаМы рассмотрели наиболее типичные схемы построения сетей, применяемых в промышленности. Вместе с тем следует заметить, что универсальных конфигураций сетей попросту не существует: в каждом конкретном случае проектировщик вырабатывает подходящее техническое решение исходя из поставленной задачи и условий применения.
[ http://kazanets.narod.ru/NT_PART2.htm]Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > промышленная сеть верхнего уровня
18 протокол управления простой сетью
протокол управления простой сетью
Протокол, управляющий сетью, сетевыми устройствами и их функциями.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]
простой протокол сетевого управления
Прикладной протокол (L7) управления сетевыми устройствами. Основное предназначение состоит в получении подробной информации о состоянии устройства и изменении его конфигурации в автоматическом режиме. Помимо периодического считывания SNMP-сервером информации с устройства, возможна активная сигнализация самим устройством о произошедших событиях.
[ http://www.morepc.ru/dict/]
простой протокол управления сетью
Протокол группы IETF по управлению сетью. Основной протокол администрирования сетей TCP/IP, обеспечивающий мониторинг и контроль сетевых устройств, обслуживание их конфигураций, сбор статистических данных, замеры производительности и проверку безопасности (МСЭ-Т Х.805; МСЭ-Т J.116).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Вопросы сетевого управления традиционно входят в число основных как для производителей программ и оборудования, так и для организаций, занимающихся разработкой стандартов. Невероятно высокий темп развития сетей на базе протокола TCP/IP (и Internet в частности) и движение в сторону создания единой информационной магистрали обусловили необходимость разработки стандартного протокола управления устройствами по сети и множества высокоуровневых продуктов, которые его используют.
Протокол управления сетями определяет стандартный метод контроля какого-либо устройства со станции управления с целью определения его состояния, настроек и иной информации, а также ее модификации. Основным протоколом управления, используемым в семействе TCP/IP, является протокол SNMP (Simple Network Management Protocol простой протокол управления сетью). Сам протокол очень прост: он определяет только иерархическое пространство имен объектов управления и способ чтения (или записи) данных этих объектов на каждом узле. Основное преимущество этого протокола заключается в том, что он позволяет единообразным образом управлять всеми типами аппаратных средств, независимо от их назначения и особенностей. Все они говорят на одном языке и могут опрашиваться и конфигурироваться с центральной станции.
Однако, SNMP не более чем протокол, поддерживающий диалог двух сторон. Для его использования необходимы две составляющие: программа-агент, работающая на сетевом устройстве, и программа-менеджер, позволяющая дистанционно отслеживать и управлять сетевыми устройствами. Способ ведения диалога между агентом и менеджером показан на рис.1.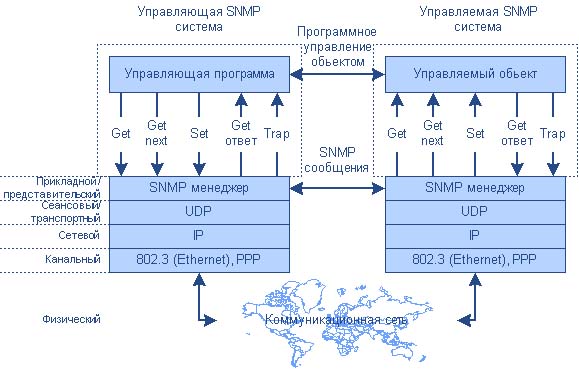
Рис. 1 Работа протокола SNMP в рамках модели OSI
Протокол SNMP традиционно используется для управления телекоммуникационным оборудованием. Для управления обычно применяются так называемые платформы сетевого управления, позволяющие осуществлять обнаружение устройств в сети, объединять модули управления оборудованием разных производителей, выполнять общие функции управления и оповещения. В число наиболее известных платформ сетевого управления входят HP OpenView (Hewlett-Packard), Solstice Domain Manager (Sun Microsystems), Tivoli NetView (Tivoli Systems), SNMPc (Castle Rock). Вместе с тем, управление с использованием SNMP может быть применено и для решения других задач в том числе для систем промышленного управления. Проиллюстрируем такой подход на реальном примере.
В ходе выполнения одного из экспортных контрактов корпорацией Стинс Коман была разработана, произведена и установлена на ТЭС Фалай (Вьетнам) система управления электрофильтром. Логически система была разделена на два уровня: нижний монтируемый в непосредственной близости от электрофильтра, и верхний осуществляющий сбор статистической информации и представляющий графически состояние всего объекта. От использования существующих SCADA-систем мы отказались из-за высокой стоимости пакета разработки и модулей времени выполнения, а также большого времени, необходимого на обучение разработчиков. Было решено пойти по пути собственной разработки. Связь между подсистемами верхнего и нижнего уровней была осуществлена традиционными для задач АСУ ТП методами. Из огромного количества используемых полевых протоколов был выбран один, наиболее подходящий по быстродействию и простоте реализации. Учитывая особенности этого протокола, был разработан программный комплекс, осуществляющий сбор информации, анализирующий статистику и графически представляющий состояние управляемого устройства.
Приступив к аналогичным работам по следующему контракту, мы постарались учесть уроки предыдущей разработки и при создании системы управления технологическими процессами воспользоваться нашим опытом проектирования больших сетевых комплексов. В новом варианте системы связь между уровнями осуществлялась по протоколу SNMP. В качестве программы верхнего уровня использовался описанный ниже универсальный SNMP-менеджер.
Использование принципов сетевого управления при создании систем управления технологическими процессами позволило избежать проблем, связанных с интеграцией различных уровней системы. Появился единый универсальный способ управления любым оборудованием, начиная от сетевого маршрутизатора и заканчивая электрофильтром. Для того чтобы появилась возможность управлять устройствами, которые ранее в принципе не подключались к сети, был разработан универсальный программно-аппаратный SNMP-агент eSCape. Это устройство построено на основе однокристального RISC-контроллера и для подключения к сети (локальной или территориально-распределенной) использует Ethernet или PPP. Оно обладает малым весом и невысокой стоимостью и предоставляет широкий выбор вариантов сопряжения с управляемым объектом.
При разработке системы промышленного управления, реализованной в виде SNMP-менеджера, изначально были сформулированы следующие требования:- новый программный продукт должен обеспечивать сбор и хранение статистических данных, которые должны легко импортироваться в другие программы;
- новый программный продукт должен работать как под управлением ОС MS Windows 9x/NT/2000, так и под управлением ОС Linux;
- новый программный продукт должен обеспечивать достаточное быстродействие на машинах бюджетного класса;
- для разработки программ рекомендуется использовать свободно распространяемые продукты с открытым исходным кодом.
В результате был разработан программный комплекс EscView, архитектура которого приведена на рис.2.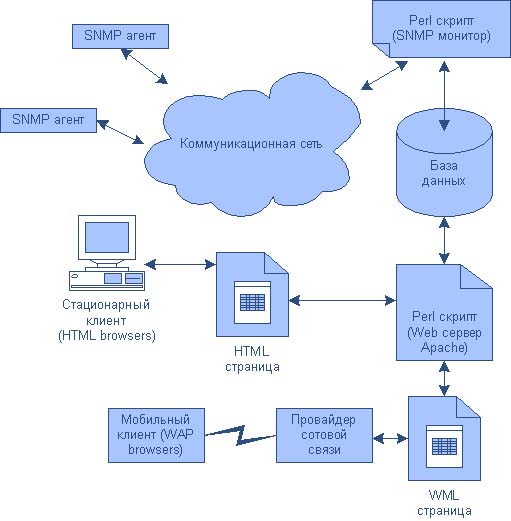
Рис.2 Программный комплекс, осуществляющий сбор информации, анализ статистики и графическое представление состояния управляемого устройства
Каждому управляемому устройству соответствует SNMP-агент, который может быть встроенным или внешним. SNMP-агенты, подключенные к сети протокола TCP/IP, периодически опрашиваются программой-монитором, которая написана на языке Perl. Периодичность и частота опроса, а также перечень интересующих SNMP-агентов записаны в базе данных, построенной на пакете программ MySQL. Все переменные, считанные в процессе опроса, сохраняются в базе данных. SNMP-агент может также сам проинформировать систему управления о том или ином изменении своего состояния. Для подачи команд устройствам необходимо изменить соответствующие поля базы данных. Все изменения, произошедшие в базе данных, адресно передаются SNMP-агентам.
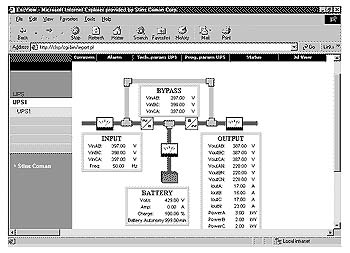
Рис.3 Пример диалога с пользователем в формате HTML-страницы
Для реализации графического интерфейса пользователя используется HTTP-сервер Apache. Программа, написанная на языке Perl, поддерживает диалоги с пользователем и при помощи базы данных динамически формирует ответ в формате HTML-страницы или в формате WML-страницы.
Страницы HTML предназначены для пользователей, работающих с любым Internet-браузером (например, MS Internet Explorer или Netscape Navigator). Пример реального диалога представлен на рис.3. Страницы WML предназначены для мобильных устройств, поддерживающих протокол WAP (таким устройством может быть сотовый телефон). Для поддержки WAP-клиентов никаких специальных аппаратных доработок производить не надо: в качестве шлюза выступают ресурсы, штатно предоставляемые сотовыми операторами. Соединение между сотовым шлюзом и SNMP-менеджером осуществляется через Internet.
Данное решение может функционировать как под управлением ОС MS Windows 9x/NT/2000, так и под управлением ОС UNIX/Linux. Все программные продукты, используемые при разработке, распространяются свободно.
Описываемое решение уже используется для обслуживания мощных источников бесперебойного питания. В настоящее время на базе этого решения разрабатывается комплекс программ, предназначенных для управления электрофильтром. Оно, в частности, может использоваться для создания интеллектуальных зданий, для распределенного сбора информации с датчиков, а также для реализации заданного промышленного управления через типовые объединённые сети.
[ http://www.mka.ru/?p=40138]Тематики
Действия
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > протокол управления простой сетью
19 дистанционное техническое обслуживание
дистанционное техническое обслуживание
Техническое обслуживание объекта, проводимое под управлением персонала без его непосредственного присутствия.
[ОСТ 45.152-99 ]Параллельные тексты EN-RU из ABB Review. Перевод компании Интент
Service from afarДистанционный сервисABB’s Remote Service concept is revolutionizing the robotics industryРазработанная АББ концепция дистанционного обслуживания Remote Service революционизирует робототехникуABB robots are found in industrial applications everywhere – lifting, packing, grinding and welding, to name a few. Robust and tireless, they work around the clock and are critical to a company’s productivity. Thus, keeping these robots in top shape is essential – any failure can lead to serious output consequences. But what happens when a robot malfunctions?Роботы АББ используются во всех отраслях промышленности для перемещения грузов, упаковки, шлифовки, сварки – всего и не перечислить. Надежные и неутомимые работники, способные трудиться день и ночь, они представляют большую ценность для владельца. Поэтому очень важно поддерживать их в надлежащей состоянии, ведь любой отказ может иметь серьезные последствия. Но что делать, если робот все-таки сломался?ABB’s new Remote Service concept holds the answer: This approach enables a malfunctioning robot to alarm for help itself. An ABB service engineer then receives whole diagnostic information via wireless technology, analyzes the data on a Web site and responds with support in just minutes. This unique service is paying off for customers and ABB alike, and in the process is revolutionizing service thinking.Ответом на этот вопрос стала новая концепция Remote Service от АББ, согласно которой неисправный робот сам просит о помощи. C помощью беспроводной технологии специалист сервисной службы АББ получает всю необходимую диагностическую информацию, анализирует данные на web-сайте и через считанные минуты выдает рекомендации по устранению отказа. Эта уникальная возможность одинаково ценна как для заказчиков, так и для самой компании АББ. В перспективе она способна в корне изменить весь подход к организации технического обслуживания.Every minute of production downtime can have financially disastrous consequences for a company. Traditional reactive service is no longer sufficient since on-site service engineer visits also demand great amounts of time and money. Thus, companies not only require faster help from the service organization when needed but they also want to avoid disturbances in production.Каждая минута простоя производства может привести к губительным финансовым последствиям. Традиционная организация сервиса, предусматривающая ликвидацию возникающих неисправностей, становится все менее эффективной, поскольку вызов сервисного инженера на место эксплуатации робота сопряжен с большими затратами времени и денег. Предприятия требуют от сервисной организации не только более быстрого оказания помощи, но и предотвращения возможных сбоев производства.In 2006, ABB developed a new approach to better meet customer’s expectations: Using the latest technologies to reach the robots at customer sites around the world, ABB could support them remotely in just minutes, thereby reducing the need for site visits. Thus the new Remote Service concept was quickly brought to fruition and was launched in mid-2007. Statistics show that by using the system the majority of production stoppages can be avoided.В 2006 г. компания АББ разработала новый подход к удовлетворению ожиданий своих заказчиков. Использование современных технологий позволяет специалистам АББ получать информацию от роботов из любой точки мира и в считанные минуты оказывать помощь дистанционно, в результате чего сокращается количество выездов на место установки. Запущенная в середине 2007 г. концепция Remote Service быстро себя оправдала. Статистика показывает, что её применение позволило предотвратить большое число остановок производства.Reactive maintenance The hardware that makes ABB Remote Service possible consists of a communication unit, which has a function similar to that of an airplane’s so-called black box 1. This “service box” is connected to the robot’s control system and can read and transmit diagnostic information. The unit not only reads critical diagnostic information that enables immediate support in the event of a failure, but also makes it possible to monitor and analyze the robot’s condition, thereby proactively detecting the need for maintenance.Устранение возникающих неисправностей Аппаратное устройство, с помощью которого реализуется концепция Remote Service, представляет собой коммуникационный блок, работающий аналогично черному ящику самолета (рис. 1). Этот блок считывает диагностические данные из контроллера робота и передает их по каналу GSM. Считывается не только информация, необходимая для оказания немедленной помощи в случае отказа, но и сведения, позволяющие контролировать и анализировать состояние робота для прогнозирования неисправностей и планирования технического обслуживания.If the robot breaks down, the service box immediately stores the status of the robot, its historical data (as log files), and diagnostic parameters such as temperature and power supply. Equipped with a built-in modem and using the GSM network, the box transmits the data to a central server for analysis and presentation on a dedicated Web site. Alerts are automatically sent to the nearest of ABB’s 1,200 robot service engineers who then accesses the detailed data and error log to analyze the problem.При поломке робота сервисный блок немедленно сохраняет данные о его состоянии, сведения из рабочего журнала, а также значения диагностических параметров (температура и характеристики питания). Эти данные передаются встроенным GSM-модемом на центральный сервер для анализа и представления на соответствующем web-сайте. Аварийные сообщения автоматически пересылаются ближайшему к месту аварии одному из 1200 сервисных инженеров-робототехников АББ, который получает доступ к детальной информации и журналу аварий для анализа возникшей проблемы.A remotely based ABB engineer can then quickly identify the exact fault, offering rapid customer support. For problems that cannot be solved remotely, the service engineer can arrange for quick delivery of spare parts and visit the site to repair the robot. Even if the engineer must make a site visit, service is faster, more efficient and performed to a higher standard than otherwise possible.Специалист АББ может дистанционно идентифицировать отказ и оказать быструю помощь заказчику. Если неисправность не может быть устранена дистанционно, сервисный инженер организовывает доставку запасных частей и выезд ремонтной бригады. Даже если необходимо разрешение проблемы на месте, предшествующая дистанционная диагностика позволяет минимизировать объем работ и сократить время простоя.Remote Service enables engineers to “talk” to robots remotely and to utilize tools that enable smart, fast and automatic analysis. The system is based on a machine-to-machine (M2M) concept, which works automatically, requiring human input only for analysis and personalized customer recommendations. ABB was recognized for this innovative solution at the M2M United Conference in Chicago in 2008 Factbox.Remote Service позволяет инженерам «разговаривать» с роботами на расстоянии и предоставляет в их распоряжение интеллектуальные средства быстрого автоматизированного анализа. Система основана на основе технологии автоматической связи машины с машиной (M2M), где участие человека сводится к анализу данных и выдаче рекомендаций клиенту. В 2008 г. это инновационное решение от АББ получило приз на конференции M2M United Conference в Чикаго (см. вставку).Proactive maintenanceRemote Service also allows ABB engineers to monitor and detect potential problems in the robot system and opens up new possibilities for proactive maintenance.Прогнозирование неисправностейRemote Service позволяет инженерам АББ дистанционно контролировать состояние роботов и прогнозировать возможные неисправности, что открывает новые возможности по организации профилактического обслуживания.The service box regularly takes condition measurements. By monitoring key parameters over time, Remote Service can identify potential failures and when necessary notify both the end customer and the appropriate ABB engineer. The management and storage of full system backups is a very powerful service to help recover from critical situations caused, for example, by operator errors.Сервисный блок регулярно выполняет диагностические измерения. Непрерывно контролируя ключевые параметры, Remote Service может распознать потенциальные опасности и, при необходимости, оповещать владельца оборудования и соответствующего специалиста АББ. Резервирование данных для возможного отката является мощным средством, обеспечивающим восстановление системы в критических ситуациях, например, после ошибки оператора.The first Remote Service installation took place in the automotive industry in the United States and quickly proved its value. The motherboard in a robot cabinet overheated and the rise in temperature triggered an alarm via Remote Service. Because of the alarm, engineers were able to replace a faulty fan, preventing a costly production shutdown.Первая система Remote Service была установлена на автозаводе в США и очень скоро была оценена по достоинству. Она обнаружила перегрев материнской платы в шкафу управления роботом и передала сигнал о превышении допустимой температуры, благодаря чему инженеры смогли заменить неисправный вентилятор и предотвратить дорогостоящую остановку производства.MyRobot: 24-hour remote access
Having regular access to a robot’s condition data is also essential to achieving lean production. At any time, from any location, customers can verify their robots’ status and access maintenance information and performance reports simply by logging in to ABB’s MyRobot Web site. The service enables customers to easily compare performances, identify bottlenecks or developing issues, and initiate the mostСайт MyRobot: круглосуточный дистанционный доступДля того чтобы обеспечить бесперебойное производство, необходимо иметь регулярный доступ к информации о состоянии робота. Зайдя на соответствующую страницу сайта MyRobot компании АББ, заказчики получат все необходимые данные, включая сведения о техническом обслуживании и отчеты о производительности своего робота. Эта услуга позволяет легко сравнивать данные о производительности, обнаруживать возможные проблемы, а также оптимизировать планирование технического обслуживания и модернизации. С помощью MyRobot можно значительно увеличить выпуск продукции и уменьшить количество выбросов.Award-winning solutionIn June 2008, the innovative Remote Service solution won the Gold Value Chain award at the M2M United Conference in Chicago. The value chain award honors successful corporate adopters of M2M (machine–to-machine) technology and highlights the process of combining multiple technologies to deliver high-quality services to customers. ABB won in the categoryof Smart Services.Приз за удачное решениеВ июне 2008 г. инновационное решение Remote Service получило награду Gold Value Chain (Золотая цепь) на конференции M2M United Conference в Чикаго. «Золотая цепь» присуждается за успешное масштабное внедрение технологии M2M (машина – машина), а также за достижения в объединении различных технологий для предоставления высококачественных услуг заказчикам. АББ одержала победу в номинации «Интеллектуальный сервис».Case study: Tetley Tetley GB Ltd is the world’s second-largest manufacturer and distributor of tea. The company’s manufacturing and distribution business is spread across 40 countries and sells over 60 branded tea bags. Tetley’s UK tea production facility in Eaglescliffe, County Durham is the sole producer of Tetley tea bags 2.Пример применения: Tetley Компания TetleyGB Ltd является вторым по величине мировым производителем и поставщиком чая. Производственные и торговые филиалы компании имеются в 40 странах, а продукция распространяется под 60 торговыми марками. Чаеразвесочная фабрика в Иглсклифф, графство Дарем, Великобритания – единственный производитель чая Tetley в пакетиках (рис. 2).ABB offers a flexible choice of service agreements for both new and existing robot installations, which can help extend the mean time between failures, shorten the time to repair and lower the cost of automated production.Предлагаемые АББ контракты на выполнение технического обслуживания как уже имеющихся, так и вновь устанавливаемых роботов, позволяют значительно увеличить среднюю наработку на отказ, сократить время ремонта и общую стоимость автоматизированного производства.Robots in the plant’s production line were tripping alarms and delaying the whole production cycle. The spurious alarms resulted in much unnecessary downtime that was spent resetting the robots in the hope that another breakdown could be avoided. Each time an alarm was tripped, several hours of production time was lost. “It was for this reason that we were keen to try out ABB’s Remote Service agreement,” said Colin Trevor, plant maintenance manager.Установленные в технологической линии роботы выдавали аварийные сигналы, задерживающие выполнение производственного цикла. Ложные срабатывания вынуждали перезапускать роботов в надежде предотвратить возможные отказы, в результате чего после каждого аварийного сигнала производство останавливалось на несколько часов. «Именно поэтому мы решили попробовать заключить с АББ контракт на дистанционное техническое обслуживание», – сказал Колин Тревор, начальник технической службы фабрики.To prevent future disruptions caused by unplanned downtime, Tetley signed an ABB Response Package service agreement, which included installing a service box and system infrastructure into the robot control systems. Using the Remote Service solution, ABB remotely monitors and collects data on the “wear and tear” and productivity of the robotic cells; this data is then shared with the customer and contributes to smooth-running production cycles.Для предотвращения ущерба в результате незапланированных простоев Tetley заключила с АББ контракт на комплексное обслуживание Response Package, согласно которому системы управления роботами были дооборудованы сервисными блоками с необходимой инфраструктурой. С помощью Remote Service компания АББ дистанционно собирает данные о наработке, износе и производительности роботизированных модулей. Эти данные предоставляются заказчику для оптимизации загрузки производственного оборудования.Higher production uptimeSince the implementation of Remote Service, Tetley has enjoyed greatly reduced robot downtime, with no further disruptions caused by unforeseen problems. “The Remote Service package has dramatically changed the plant,” said Trevor. “We no longer have breakdown issues throughout the shift, helping us to achieve much longer periods of robot uptime. As we have learned, world-class manufacturing facilities need world-class support packages. Remote monitoring of our robots helps us to maintain machine uptime, prevent costly downtime and ensures my employees can be put to more valuable use.”Увеличение полезного времениС момента внедрения Remote Service компания Tetley была приятно удивлена резким сокращением простоя роботов и отсутствием незапланированных остановок производства. «Пакет Remote Service резко изменил ситуацию на предприятии», – сказал Тревор. «Мы избавились от простоев роботов и смогли резко увеличить их эксплуатационную готовность. Мы поняли, что для производственного оборудования мирового класса необходим сервисный пакет мирового класса. Дистанционный контроль роботов помогает нам поддерживать их в рабочем состоянии, предотвращать дорогостоящие простои и задействовать наш персонал для выполнения более важных задач».Service accessRemote Service is available worldwide, connecting more than 500 robots. Companies that have up to 30 robots are often good candidates for the Remote Service offering, as they usually have neither the engineers nor the requisite skills to deal with robotics faults themselves. Larger companies are also enthusiastic about Remote Service, as the proactive services will improve the lifetime of their equipment and increase overall production uptime.Доступность сервисаСеть Remote Service охватывает более 700 роботов по всему миру. Потенциальными заказчиками Remote Service являются компании, имеющие до 30 роботов, но не имеющие инженеров и техников, способных самостоятельно устранять их неисправности. Интерес к Remote Service проявляют и более крупные компании, поскольку они заинтересованы в увеличении срока службы и эксплуатационной готовности производственного оборудования.In today’s competitive environment, business profitability often relies on demanding production schedules that do not always leave time for exhaustive or repeated equipment health checks. ABB’s Remote Service agreements are designed to monitor its customers’ robots to identify when problems are likely to occur and ensure that help is dispatched before the problem can escalate. In over 60 percent of ABB’s service calls, its robots can be brought back online remotely, without further intervention.В условиях современной конкуренции окупаемость бизнеса часто зависит от соблюдения жестких графиков производства, не оставляющих времени для полномасштабных или периодических проверок исправности оборудования. Контракт Remote Service предусматривает мониторинг состояния роботов заказчика для прогнозирования возможных неисправностей и принятие мер по их предотвращению. В более чем 60 % случаев для устранения неисправности достаточно дистанционной консультации в сервисной службе АББ, дальнейшего вмешательства не требуется.ABB offers a flexible choice of service agreements for both new and existing robot installations, which helps extend the mean time between failures, shorten the time to repair and lower the total cost of ownership. With four new packages available – Support, Response, Maintenance and Warranty, each backed up by ABB’s Remote Service technology – businesses can minimize the impact of unplanned downtime and achieve improved production-line efficiency.Компания АББ предлагает гибкий выбор контрактов на выполнение технического обслуживания как уже имеющихся, так и вновь устанавливаемых роботов, которые позволяют значительно увеличить среднюю наработку на отказ, сократить время ремонта и эксплуатационные расходы. Четыре новых пакета на основе технологии Remote Service – Support, Response, Maintenance и Warranty – позволяют минимизировать внеплановые простои и значительно повысить эффективность производства.The benefits of Remote Sevice are clear: improved availability, fewer service visits, lower maintenance costs and maximized total cost of ownership. This unique service sets ABB apart from its competitors and is the beginning of a revolution in service thinking. It provides ABB with a great opportunity to improve customer access to its expertise and develop more advanced services worldwide.Преимущества дистанционного технического обслуживания очевидны: повышенная надежность, уменьшение выездов ремонтных бригад, уменьшение затрат на обслуживание и общих эксплуатационных расходов. Эта уникальная услуга дает компании АББ преимущества над конкурентами и демонстрирует революционный подход к организации сервиса. Благодаря ей компания АББ расширяет доступ заказчиков к опыту своих специалистов и получает возможность более эффективного оказания технической помощи по всему миру.Тематики
- тех. обсл. и ремонт средств электросвязи
Обобщающие термины
EN
Русско-английский словарь нормативно-технической терминологии > дистанционное техническое обслуживание
20 Защита от короткого замыкания и прочность при коротком замыкании
7.5. Защита от короткого замыкания и прочность при коротком замыкании
Примечание. В настоящее время требования этого пункта применимы главным образом к устройствам переменного тока. Требования к устройствам постоянного тока находятся в стадии рассмотрения.
7.5.1. Общие положения
НКУ должны иметь конструкцию, способную выдерживать тепловые и электродинамические нагрузки, возникающие при значениях токов короткого замыкания, не превышающих установленных.
Примечание. Нагрузки, возникающие вследствие короткого замыкания, могут быть уменьшены при помощи токоограничивающих устройств (индуктивностей, токоограничивающих плавких предохранителей или других токоограничивающих коммутационных устройств).
НКУ должны быть защищены от токов короткого замыкания, например, автоматическими выключателями, плавкими предохранителями или тем и другим вместе, которые могут быть частью НКУ или располагаться за его пределами.
Примечание. Если НКУ предназначены для использования в системах IT*, то аппарат защиты в каждой фазе должен иметь достаточную отключающую способность относительно междуфазного напряжения при двухфазном замыкании на землю.
* См title="Электроустановки зданий. Часть 3. Основные характеристики".
Потребитель, заказывая НКУ, должен определить условия короткого замыкания на месте его установки.
Примечание. Желательно, чтобы в случае повреждения, ведущего к образованию дуги внутри НКУ, обеспечивалась максимально возможная степень защиты персонала, хотя главной целью является предупреждение образования такой дуги принятием соответствующих мер при проектировании или ограничение длительности горения дуги.
Для ЧИ НКУ рекомендуется использовать устройства, прошедшие типовые испытания, например, системы сборных шин, если на них не распространяются исключения пп. 8.2.3.1.1 - 8.2.3.1.3. В случаях, когда применение устройств, прошедших типовые испытания, не представляется возможным, прочность этих частей при коротком замыкании проверяют путем экстраполяции, исходя из устройств, испытанных в соответствии с типовыми испытаниями.
7.5.2. Сведения, касающиеся прочности при коротком замыкании
7.5.2.1. Для НКУ, в котором имеется только один блок ввода, изготовитель обязан представлять сведения о прочности при коротком замыкании следующим образом:
7.5.2.1.1. Для НКУ с устройством защиты от короткого замыкания, включенным в блок ввода, указанием максимально допустимого значения ожидаемого тока короткого замыкания на зажимах блока ввода. Эта величина не должна превышать номинальные значения (см. пп. 4.3 - 4.7). Коэффициент мощности и пиковые значения должны соответствовать указанным в п. 7.5.3.
Если устройством защиты от короткого замыкания является плавкий предохранитель, то изготовитель обязан указать характеристики плавкой вставки (номинальный ток, отключающую способность, ток отключения, I2t и т.д.).
Если используют автоматический выключатель с расцепителем, имеющим выдержку времени, то может потребоваться указание максимальной выдержки времени и значения тока уставки, соответствующих ожидаемому току короткого замыкания.
7.5.2.1.2. Для НКУ, в которых защитное устройство от короткого замыкания не входит в блок ввода, прочность при коротком замыкании указывают с помощью следующих способов (одного или нескольких):
а) номинальный кратковременно выдерживаемый ток (п. 4.3) и номинальный ударный ток (п. 4.4) вместе с соответствующим временем, если оно отличается от 1 с. Отношение пикового значения к действующему должно соответствовать указанному в табл. 5.
Примечание. Для периодов времени с максимальным значением до 3 с соотношение между кратковременно выдерживаемым током и соответствующим временем представляется формулой
i2t = const
при условии, что пиковое значение не превышает значение номинального ударного тока;
b) номинальный ожидаемый ток короткого замыкания на зажимах блока ввода НКУ, а также соответствующее время, если оно отличается от 1 с. Соотношение между пиковым и действующим значением должно быть таким, как указано в табл. 5;
с) номинальный условный ток короткого замыкания (п. 4.6);
d) номинальный ток короткого замыкания, отключаемый плавким предохранителем (п. 4.7).
Для подпунктов с) и d) изготовитель обязан указывать характеристики (номинальный ток, отключающая способность, ток отключения, I2t и т.д.) токоограничивающих коммутационных устройств (например, автоматических выключателей или плавких предохранителей), необходимых для защиты НКУ.
Примечание. При замене плавких вставок должны использоваться вставки с такими же характеристиками.
7.5.2.2. Для НКУ с несколькими блоками ввода, одновременная работа которых маловероятна, прочность при коротком замыкании может указываться для каждого из блоков в соответствии с п. 7.5.2.1.
7.5.2.3. Для НКУ с несколькими блоками ввода, которые могут работать одновременно, а также для НКУ с одним блоком ввода и одним или несколькими блоками вывода для вращающихся машин большой мощности, могущих повлиять на величину тока короткого замыкания, должно быть заключено специальное соглашение о величинах ожидаемого тока короткого замыкания в каждом блоке ввода или вывода и на шинах.
7.5.3. Зависимость между пиковыми и действующим и значениями тока короткого замыкания
Пиковое значение тока короткого замыкания (пиковое значение первой волны тока короткого замыкания, включая постоянную составляющую) для определения электродинамических усилий, получается умножением действующего значения тока короткого замыкания на коэффициент п. Стандартные значения коэффициента n и соответствующего коэффициента мощности даны в табл. 5.
Таблица 5
Действующее значение тока короткого замыкания
cos j
n
I £ 5 кА
0,7
1,5
5 кА < I £ 10 кА
0,5
1,7
10 кА < I £ 20 кА
0,3
2
20 кА < I £ 50 кА
0,25
2,1
50 кА < I
0,2
2,2
Примечание. Значения, приведенные в табл. 5, соответствуют большинству случаев применения. В специальных местах, например, вблизи трансформаторов или генераторов, коэффициент мощности может иметь более низкие значения; таким образом, максимальное пиковое значение ожидаемого тока станет предельным значением вместо действующего значения тока короткого замыкания.
7.5.4. Координация устройств защиты от короткого замыкания
7.5.4.1. Координация устройств защиты должна являться предметом согласования между потребителем и изготовителем. Вместо такого соглашения можно использовать сведения, приводимые в каталоге предприятия-изготовителя.
7.5.4.2. Если по условиям эксплуатации необходима непрерывность питания, то уставки или выбор устройств защиты от короткого замыкания внутри НКУ должны производиться таким образом, чтобы короткое замыкание, возникающее в любой отходящей цепи ответвления, могло быть устранено с помощью отключающего устройства, установленного в поврежденной цепи ответвления без какого-либо воздействия на другие отходящие ответвления, чем гарантируется селективность системы защиты.
7.5.5. Внутренние цепи НКУ
7.5.5.1. Главные цепи
7.5.5.1.1. Шины (оголенные или с изоляцией) должны располагаться таким образом, чтобы при нормальных условиях эксплуатации исключалась возможность внутреннего короткого замыкания. При отсутствии других указаний их выбирают согласно сведениям о прочности при коротком замыкании (п. 7.5.2) и должны выдерживать по крайней мере воздействия коротких замыканий, ограниченных устройствами защиты на стороне подачи питания на шины.
7.5.5.1.2. Проводники между главными шинами и стороной питания отдельного функционального блока, также как и комплектующие, входящие в этот блок, могут быть выбраны, исходя из уменьшенных воздействий короткого замыкания со стороны присоединения нагрузки к устройству защиты от короткого замыкания в этом блоке, при условии такого расположения этих проводников, при котором в нормальных рабочих условиях внутреннее короткое замыкание между фазами и/или между фазами и землей является маловероятным, например, если проводники имеют соответствующую изоляцию или оболочку. Это также относится к проводникам со стороны питания отдельных функциональных блоков внутри НКУ, не содержащих главных шин.
7.5.5.2. Вспомогательные цепи
Обычно вспомогательные цепи должны быть защищены от воздействия коротких замыканий. Однако защитное устройство, предохраняющее от короткого замыкания, не следует применять в случае, если его срабатывание может иметь опасные последствия. В этом случае проводники вспомогательных цепей должны располагаться таким образом, чтобы в нормальных условиях работы исключалась возможность возникновения короткого замыкания.
Источник: ГОСТ 28668-90 Э: Низковольтные комплектные устройства распределения и управления. Часть 1. Требования к устройствам, испытанным полностью или частично оригинал документа
Русско-английский словарь нормативно-технической терминологии > Защита от короткого замыкания и прочность при коротком замыкании
Страницы- 1
- 2
См. также в других словарях:
Системы Оплаты Труда — способы исчисления вознаграждения за труд в соответствии с его затратами и результатами. Существуют две основные системы оплаты труда сдельная, когда труд оплачивается по его результатам, и повременная, когда труд оплачивается по проработанному… … Словарь бизнес-терминов
Системы небесных координат — системы координат, позволяющие задать положение небесного тела на небе. Подавляющее большинство С.н.к. являются сферическими и основываются на понятии небесной сферы. Выбор системы координат на небесной сфере фиксируется: избранной точкой… … Астрономический словарь
СИСТЕМЫ ОПЛАТЫ ТРУДА — способы исчисления вознаграждения за труд в соответствии с его затратами и результатами. Существуют две основные системы оплаты труда сдельная, когда труд оплачивается по его результатам, и повременная, когда труд оплачивается по проработанному… … Энциклопедия трудового права
Выбор Сочи столицей зимней Олимпиады-2014 — Первая попытка России заполучить зимние Олимпийские игры была предпринята в 1993 году в борьбе за Олимпиаду 2002. Тогда была выдвинута кандидатура того же Сочи, но российский курорт не пробился в число официальных претендентов. А победу в итоге… … Энциклопедия ньюсмейкеров
Астрономические системы координат — системы координат, позволяющие задать положение небесного тела на небе. Подавляющее большинство С.н.к. являются сферическими и основываются на понятии небесной сферы. Выбор системы координат на небесной сфере фиксируется: избранной точкой… … Астрономический словарь
Выбор объема подгрупп. — 5.5.1. Выбор объема подгрупп. Первый шаг при подготовке карт по количественному признаку определение рациональных подгрупп. Подгруппы должны быть сформированы так, чтобы вариации внутри подгруппы представляли собой только изменчивость от изделия… … Словарь-справочник терминов нормативно-технической документации
Выбор катастроф — A Choice of Catastrophes Автор: Айзек Азимов … Википедия
МЕТРИКА ПРОСТРАНСТВА-ВРЕМЕНИ — в теории относительности, задаёт расстояния (интервалы) между точками пространства времени (событиями) и, т. о., полностью определяет геометрические свойства четырёхмерного пространства времени. (см. ОТНОСИТЕЛЬНОСТИ ТЕОРИЯ, ТЯГОТЕНИЕ). Физический … Физическая энциклопедия
ГЕЛИОЦЕНТРИЧЕСКАЯ И ГЕОЦЕНТРИЧЕСКАЯ СИСТЕМЫ МИРА — два противоположных учения о строении солнечной системы и движении ее тел. Согласно гелиоцентрич. системе мира (от греч. ἥλιος Солнце), Земля, вращающаяся вокруг собств. оси, является одной из планет и вместе с ними обращается вокруг Солнца. В… … Философская энциклопедия
Естественные системы единиц — системы единиц (См. Система единиц), в которых за основные единицы приняты фундаментальные Физические постоянные такие, например, как гравитационная постоянная G, скорость света в вакууме с, постоянная Планка h, постоянная Больцмана k,… … Большая советская энциклопедия
ИСО 9004-1-94: Управление качеством и элементы системы качества. Часть 1. Руководящие указания — Терминология ИСО 9004 1 94: Управление качеством и элементы системы качества. Часть 1. Руководящие указания: 8.7. Анализ готовности продукций к реализации Следует определить возможности организации для поставки новой или модернизированной… … Словарь-справочник терминов нормативно-технической документации
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с русского на все языки
со всех языков на русский- Со всех языков на:
- Русский
- С русского на:
- Все языки
- Английский
- Немецкий
- Французский